Discrete-Time Integrator
执行信号的离散时间积分或累积
库:
Simulink /
Commonly Used Blocks
Simulink /
Discrete
HDL Coder /
Discrete
HDL Coder /
HDL Floating Point Operations
描述
使用 Discrete-Time Integrator 模块替代 Integrator 模块来创建纯离散模型。使用 Discrete-Time Integrator 模块,您可以:
在模块对话框上定义初始条件,或作为模块的输入
定义输入增益 (K) 值
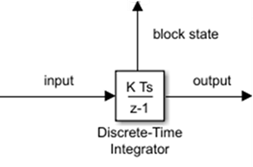
输出模块状态
定义积分的上限和下限
使用其他重置输入重置状态
输出方程
对于第一个时间步,模块状态为 n = 0,具有初始输出 y(0) = IC 或初始状态 x(0) = IC,具体取决于初始条件设置参数值。
对于仿真时间为 t(n) 的给定步长 n > 0,Simulink® 将更新输出 y(n),如下所示:
前向欧拉方法:
y(n) = y(n-1) + K*[t(n) - t(n-1)]*u(n-1)
后向欧拉方法:
y(n) = y(n-1) + K*[t(n) - t(n-1)]*u(n)
梯形法:
y(n) = y(n-1) + K*[t(n)-t(n-1)]*[u(n)+u(n-1)]/2
Simulink 根据模块的采样时间(可以是显式或触发的采样时间)自动选择这些输出方程的状态空间实现。当使用显式采样时间时,对于所有 n > 0 的步长,t(n)-t(n-1) 将减小到采样时间 T。
积分方法和累积方法
此模块可以使用前向欧拉、后向欧拉或梯形法对信号进行积分或累积。假定 u 为输入,y 为输出,x 为状态。对于给定步长 n,Simulink 将更新 y(n) 和 x(n+1)。在积分模式下,T 是模块的采样时间(如果是触发采样时间,则是 delta T)。在累积模式下,T = 1。模块采样时间决定计算输出的时间,而不是输出值。K 是增益值。值根据上限或下限进行剪切。
前向欧拉方法(默认值),也称为正向矩形或左手逼近方法
该软件将 1/s 近似为 T/(z-1)。模块在第 n 个时间步的输出的表达式为:
x(n+1) = x(n) + K*T*u(n) y(n) = x(n)
模块按照以下时间步计算输出:
Step 0: y(0) = IC (clip if necessary)
x(1) = y(0) + K*T*u(0)
Step 1: y(1) = x(1)
x(2) = x(1) + K*T*u(1)
Step n: y(n) = x(n)
x(n+1) = x(n) + K*T*u(n) (clip if necessary)使用此方法时,输入端口 1 没有直接馈通。
后向欧拉方法,也称为反向矩形或右手逼近方法
该软件将 1/s 近似为 T*z/(z-1)。模块在第 n 个时间步生成的输出的表达式为:
y(n) = y(n-1) + K*T*u(n).
假设 x(n) = y((n)-1)。模块按照以下时间步计算输出。
如果触发子系统和函数调用子系统的参数初始条件设置设置为输出或自动:
Step 0: y(0) = IC (clipped if necessary) x(1) = y(0)如果非触发子系统的参数初始条件设置设置为 :
Step 0: x(0) = IC (clipped if necessary) x(1) = y(0) = x(0) + K*T*u(0) Step 1: y(1) = x(1) + K*T*u(1) x(2) = y(1) Step n: y(n) = x(n) + K*T*u(n) x(n+1) = y(n)
使用此方法时,输入端口 1 具有直接馈通。
对于此方法,本软件将 1/s 近似为 T/2*(z+1)/(z-1)。
当 T 固定时(等于采样周期),计算输出的表达式为:
x(n) = y(n-1) + K*T/2*u(n-1) y(n) = x(n) + K*T/2*u(n)
如果触发子系统和函数调用子系统的参数初始条件设置设置为输出或自动:
Step 0: y(0) = IC (clipped if necessary) x(1) = y(0) + K*T/2*u(0)如果非触发子系统的参数初始条件设置设置为 :
Step 0: x(0) = IC (clipped if necessary) y(0) = x(0) + K*T/2*u(0) x(1) = y(0) + K*T/2*u(0) Step 1: y(1) = x(1) + K*T/2*u(1) x(2) = y(1) + K*T/2*u(1) Step n: y(n) = x(n) + K*T/2*u(n) x(n+1) = y(n) + K*T/2*u(n)
这里,x(n+1) 是下一个输出的最佳估计值。它与状态的不同之处在于,x(n) 不等于 y(n)。
使用此方法时,输入端口 1 具有直接馈通。
当 T 是变量时(例如,从触发时间获得),模块将按照以下时间步计算输出。
如果触发子系统和函数调用子系统的参数初始条件设置设置为输出或自动:
Step 0: y(0) = IC (clipped if necessary) x(1) = y(0)如果非触发子系统的参数初始条件设置设置为 :
Step 0: x(0) = IC (clipped if necessary) x(1) = y(0) = x(0) + K*T/2*u(0) Step 1: y(1) = x(1) + K*T/2*(u(1) + u(0)) x(2) = y(1) Step n: y(n) = x(n) + K*T/2*(u(n) + u(n-1)) x(n+1) = y(n)
定义初始条件
可以在模块对话框上将初始条件定义为参数,或者从外部信号输入初始条件:
要将初始条件定义为模块参数,请将初始条件来源参数设置为内部并在初始条件文本框中输入值。
要从外部源提供初始条件,请将初始条件来源参数设置为外部。模块上出现一个额外的输入端口。

何时使用状态端口
在以下情况下,请使用状态端口而不是输出端口:
当模块输出通过重置端口或初始条件端口馈送回模块,从而产生代数环时。有关示例,请参阅
sldemo_bounce_two_integrators模型。当您要从一个条件执行子系统向另一个条件执行子系统传递状态,从而可能导致计时问题时。有关示例,请参阅Building a Clutch Lock-Up Model。
要解决这些问题,您可以通过状态端口而不是输出端口来传递状态。Simulink 在与输出略有不同的时间生成状态,从而避免您的模型出现这些问题。要输出模块状态,请选中显示状态端口复选框。状态端口出现在模块顶部。
限制积分
要使输出在一定的级别内,请选中限制输出复选框,并在对应的文本框中输入范围限制。此操作会使该模块起到限量积分器的作用。当输出达到界限时,积分作用将关闭以防止积分饱和。在仿真期间,您可以更改限制,但不能更改是否限制输出。下表显示了模块如何决定输出。
| 积分 | 输出 |
|---|---|
| 低于饱和下限 | 保持在饱和下限 |
| 介于饱和下限和饱和上限之间 | 积分 |
| 大于饱和上限 | 保持在饱和上限 |
要生成指示积分何时达到限制的信号,请选中显示饱和端口复选框。模块输出端口下方会显示一个新饱和端口。
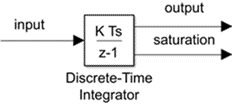
饱和信号具有以下三个值之一:
1 表示积分在上限。
0 表示积分不受限制。
-1 表示积分在下限。
重置状态
模块根据外部信号将其状态重置为指定的初始条件。要使模块重置其状态,请选择外部重置参数选项之一。将出现一个重置端口,指明重置触发器类型。
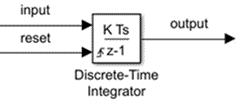
重置端口具有直接馈通。如果模块输出直接或通过一系列带直接馈通的模块反馈到此端口中,则会产生代数环。要解决此循环,请改为将模块状态端口的输出馈送给重置端口。要访问模块状态,请选中显示状态端口复选框。
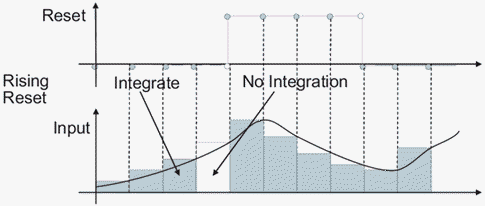
重置触发器类型
通过外部重置参数,您可以确定触发重置的重置信号的属性。触发器选项包括:
上升沿 - 当重置信号具有上升沿时重置状态。例如,下图显示了上升沿重置触发器对后向欧拉积分的影响。
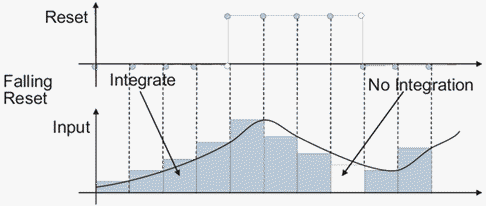
下降沿 - 当重置信号具有下降沿时重置状态。例如,下图显示了下降沿重置触发器对后向欧拉积分的影响。
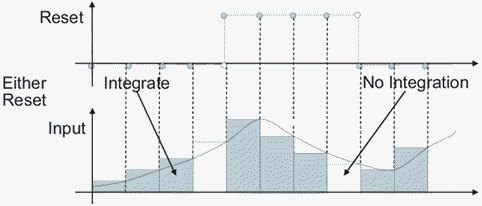
任一沿 - 当重置信号上升或下降时重置状态。例如,下图显示了任一沿重置触发器对后向欧拉积分的影响。
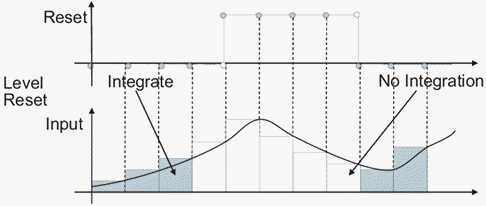
电平 - 当重置信号非零时重置输出并使输出保持在初始条件。例如,下图显示了电平重置触发器对后向欧拉积分的影响。
采样电平 - 当重置信号非零时,将输出重置为初始条件。例如,下图显示了采样电平重置触发器对后向欧拉积分的影响。
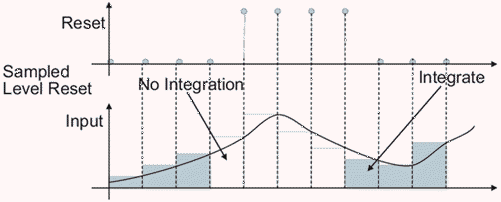
采样电平重置选项需要的计算比较少,因此效率比电平重置选项高。
注意
对于 Discrete-Time Integrator 模块,所有触发器检测都基于具有正值的信号。例如,从 -1 变成 0 的信号不是上升沿,但从 0 变成 1 的信号是上升沿。
简化初始化模式下的行为
在配置参数对话框中将“欠定初始化检测”设置为简化时,将启用简化初始化模式。如果您使用简化初始化模式,Discrete-Time Integrator 模块的行为将不同于经典初始化模式。新的初始化行为更稳定,并且在以下情况下提供更加一致的行为:
在代数环中
在启用和禁用时
在比较使用触发采样时间和使用显式采样时间(触发模块的速率与显式采样时间的速率相同)的结果时
在简化初始化模式下,Continuous-Time Integrator 模块更容易转换为 Discrete-Time Integrator 模块,因为初始条件对这两个模块的意义相同。
有关经典和简化初始化模式的详细信息,请参阅Underspecified initialization detection。
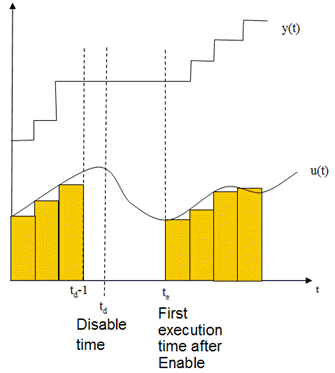
对于触发子系统和函数调用子系统,当您使用简化初始化模式并将初始条件设置设置为输出时,模块的启用和禁用行为将被简化,如下所示。
在禁用时间 td:
y(td) = y(td-1)
在启用时间 te:
如果父级子系统控制端口的启用时的状态设置为重置:
y(te) = IC.
如果父级子系统控制端口的启用时的状态设置为保持:
y(te) = y(td).
下图显示了这种情况。
使用简化初始化模式时,不能在迭代子系统模块中放置 Discrete-Time Integrator 模块。
在简化初始化模式下,迭代子系统不维护已用时间。因此,如果在迭代子系统模块中放置需要已用时间的 Discrete-Time Integrator 模块,Simulink 将报告错误。
函数调用子系统内的使能子系统中的行为
假设您有一个函数调用子系统,其中包含一个使能子系统,后者又包含一个 Discrete-Time Integrator 模块。将发生以下行为。
| 积分器方法 | 函数调用触发端口的采样时间类型 | 当函数调用子系统在启用后第一次执行时的 delta T 值 | 出现此行为的原因 |
|---|---|---|---|
前向欧拉 | 触发 |
| 当函数调用子系统第一次执行时,积分器算法将使用 |
后向欧拉和梯形 | 触发 |
| 当函数调用子系统第一次执行时,积分器算法将使用 |
前向欧拉、后向欧拉和梯形 | 周期 | 函数调用生成器的采样时间 | 在周期性模式下,Discrete-Time Integrator 模块将使用函数调用生成器的采样时间作为 |
示例
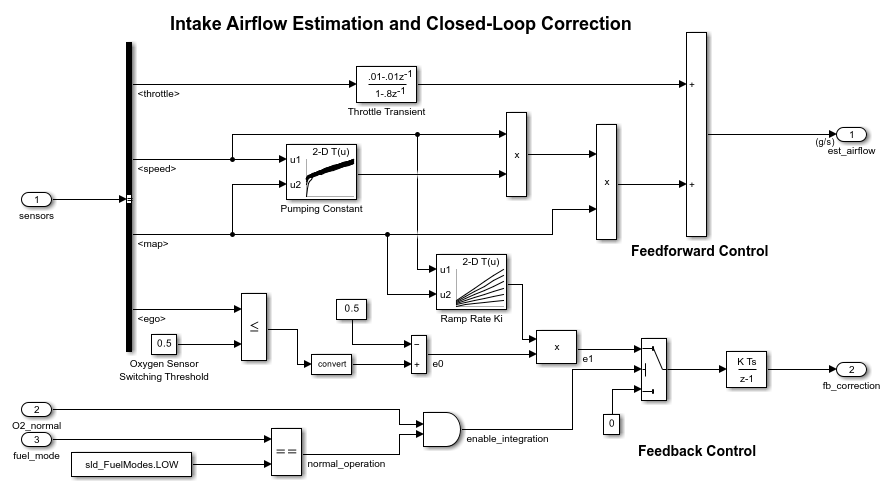
使用前向欧拉积分方法的离散时间积分
模型 sldemo_fuelsys 在子系统 fuel_rate_control/airflow_calc 中使用 Discrete-Time Integrator 模块。

Building a Clutch Lock-Up Model
Use Simulink® to model and simulate a rotating clutch system. Although modeling a clutch system is difficult because of topological changes in the system dynamics during lockup, this example shows how enabled subsystem can easily handle such problems. We illustrate how to employ important Simulink modeling concepts in the creation of the clutch simulation. Designers can apply these concepts to many models with strong discontinuities and constraints that may change dynamically.
弹球的仿真
此示例使用一个弹球的两个模型来说明对具有 Zeno 行为的混合动态系统进行建模的不同方法。一般来说,Zeno 行为的特征可非正式地表示为某些混合系统在有限时间间隔内发生无限数量的事件。球在失去能量的同时,球与地面发生碰撞的时间间隔越来越短。
端口
输入
输出
参数
模块特性
数据类型 |
|
直接馈通 |
|
多维信号 |
|
可变大小信号 |
|
过零检测 |
|
详细信息
扩展功能
版本历史记录
在 R2006a 之前推出另请参阅
主题
- 模型接口元素的 C 数据代码接口配置 (Simulink Coder)
- 模型接口元素的 C 数据代码接口配置 (Simulink Coder)
- 使用 Struct 存储类将参数数据组织为结构体 (Embedded Coder)