evaluateDetectionPrecision
(To be removed) Evaluate precision metric for object detection
Use evaluateObjectDetection instead of
evaluateDetectionPrecision, which will be removed in a future
release. The more recent evaluateObjectDetection can be used to perform
a comprehensive analysis of object detector performance.
Syntax
Description
averagePrecision = evaluateDetectionPrecision(detectionResults,groundTruthData)detectionResults
compared to the groundTruthData. You can use the average
precision to measure the performance of an object detector. For a multiclass
detector, the function returns averagePrecision as a vector
of scores for each object class in the order specified by
groundTruthData.
[ returns data points for
plotting the precision–recall curve, using input arguments from the previous
syntax.averagePrecision,recall,precision]
= evaluateDetectionPrecision(___)
[___] = evaluateDetectionPrecision(___, specifies
the overlap threshold for assigning a detection to a ground truth
box.threshold)
Input Arguments
Object locations and scores, specified as a two-column table containing the bounding boxes and scores for each detected object. For multiclass detection, a third column contains the predicted label for each detection. The bounding boxes must be stored in an M-by-4 cell array. The scores must be stored in an M-by-1 cell array, and the labels must be stored as a categorical vector.
When detecting objects, you can create the detection results table by
using imageDatastore.
ds = imageDatastore(stopSigns.imageFilename);
detectionResults = detect(detector,ds);Data Types: table
Labeled ground truth, specified as a datastore or a table.
Each bounding box must be in the format [x y width height].
Datastore — A datastore whose
readandreadallfunctions return a cell array or a table with at least two columns of bounding box and labels cell vectors. The bounding boxes must be in a cell array of M-by-4 matrices in the format [x,y,width,height]. The datastore'sreadandreadallfunctions must return one of the formats:{boxes,labels} — The
boxLabelDatastorecreates this type of datastore.{images,boxes,labels} — A combined datastore. For example, using
combine(imds,blds).
See
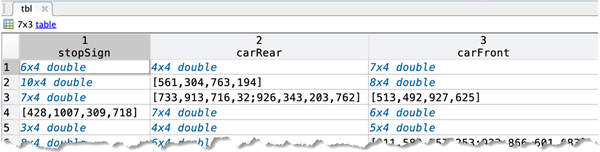
boxLabelDatastore.Table — One or more columns. All columns contain bounding boxes. Each column must be a cell vector that contains M-by-4 matrices that represent a single object class, such as stopSign, carRear, or carFront. The columns contain 4-element double arrays of M bounding boxes in the format [x,y,width,height]. The format specifies the upper-left corner location and size of the bounding box in the corresponding image.
Overlap threshold for assigned a detection to a ground truth box, specified as a numeric scalar. The overlap ratio is computed as the intersection over union.