detect
Detect objects using SSD multibox object detector
Syntax
Description
bboxes = detect(detector,I)I, using
an single shot multibox detector (SSD). The locations of objects detected are returned as
a set of bounding boxes.
When using this function, use of a CUDA® enabled NVIDIA® GPU is highly recommended. The GPU reduces computation time significantly. Usage of the GPU requires Parallel Computing Toolbox™. For information about the supported compute capabilities, see GPU Computing Requirements (Parallel Computing Toolbox).
[___,
also returns a categorical array of labels assigned to the bounding boxes, using either of
the preceding syntaxes. The labels used for object classes are defined during training
using the labels] = detect(detector,I)trainSSDObjectDetector function.
[___] = detect(___,
detects objects within the rectangular search region specified by
roi)roi.
detectionResults = detect(detector,ds)read function
of the input datastore.
[___] = detect(___,
specifies options using one or more Name,Value)Name,Value pair arguments. For
example, detect(detector,I,"Threshold",0.75) sets the detection score
threshold to 0.75. Any detections with a lower score are
removed.
Examples
Load a pretrained single shot detector (SSD) object to detect vehicles in an image. The detector is trained with images of cars on a highway scene.
vehicleDetector = load("ssdVehicleDetector.mat","detector"); detector = vehicleDetector.detector;
Read a test image into the workspace.
I = imread("highway.png");Display the test image.
imshow(I)

Run the pretrained SSD object detector by using the detect function. The output contains the bounding boxes, scores, and the labels for vehicles detected in the image. The labels are derived from the ClassNames property of the detector.
[bboxes,scores,labels] = detect(detector,I)
bboxes = 2×4
139 78 96 81
99 67 165 146
scores = 2×1 single column vector
0.8349
0.6302
labels = 2×1 categorical
vehicle
vehicle
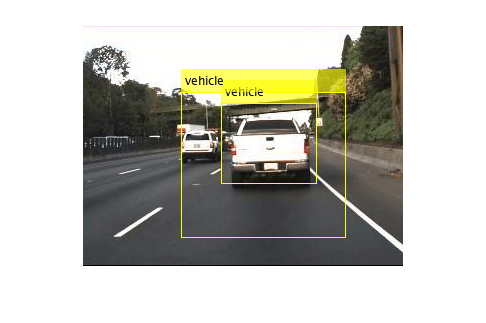
Annotate the image with the detection results.
if ~isempty(bboxes) detectedI = insertObjectAnnotation(I,"rectangle",bboxes,cellstr(labels)); else detectedI = insertText(I,[10 10],"No Detections"); end imshow(detectedI)
Input Arguments
Name-Value Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2020a