视觉 SLAM 和运动重建
立体视觉是通过比较同一场景的两个或更多视图从相机图像中恢复深度的过程。运动重建 (SfM) 是基于一组二维图像估计场景的三维结构的过程。视觉同步定位与地图构建 (vSLAM) 是计算相机相对于其周围环境的位置和方向并同时进行环境地图构建的过程。视觉-惯性 SLAM (viSLAM) 是将来自相机的视觉输入与来自 IMU 的位置数据进行融合以改进 SLAM 结果的过程。有关更多详细信息,请参阅Implement Visual SLAM in MATLAB和What Is Structure from Motion?。
精选示例
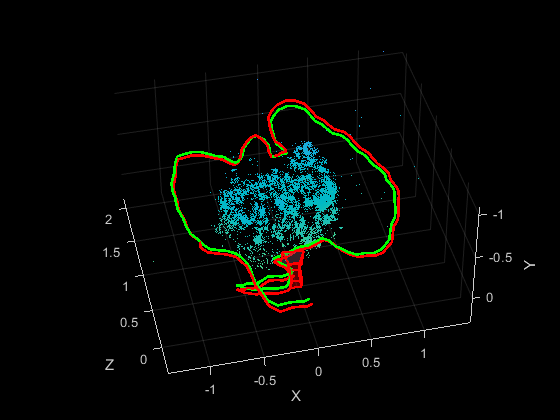
Performant and Deployable Monocular Visual SLAM
Use visual inputs from a camera to perform vSLAM and generate multi-threaded C/C++ code.
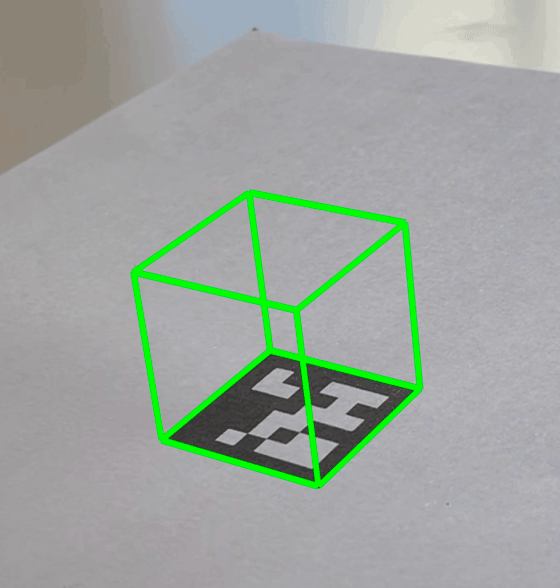
Augmented Reality Using AprilTag Markers
Use marker-based augmented reality to render virtual content into a scene.
Performant and Deployable Stereo Visual SLAM with Fisheye Images
Use fisheye image data from a stereo camera to perform VSLAM and generate multi-threaded C/C++ code.
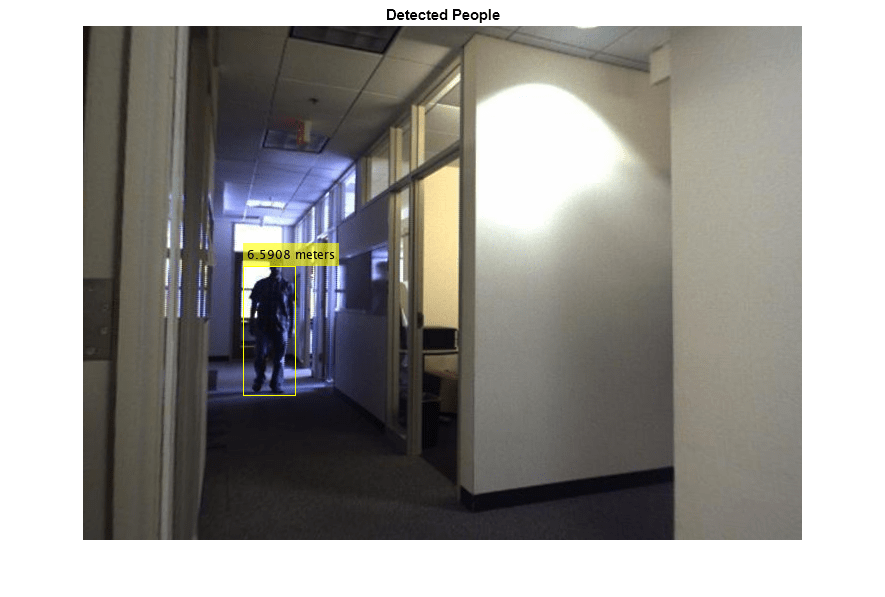
Depth Estimation from Stereo Video
Detect people in video taken with a calibrated stereo camera and determine distance from the camera.
Develop Visual SLAM Algorithm Using Unreal Engine Simulation
Develop a visual simultaneous localization and mapping (SLAM) algorithm using image data obtained from the Unreal Engine® simulation environment.

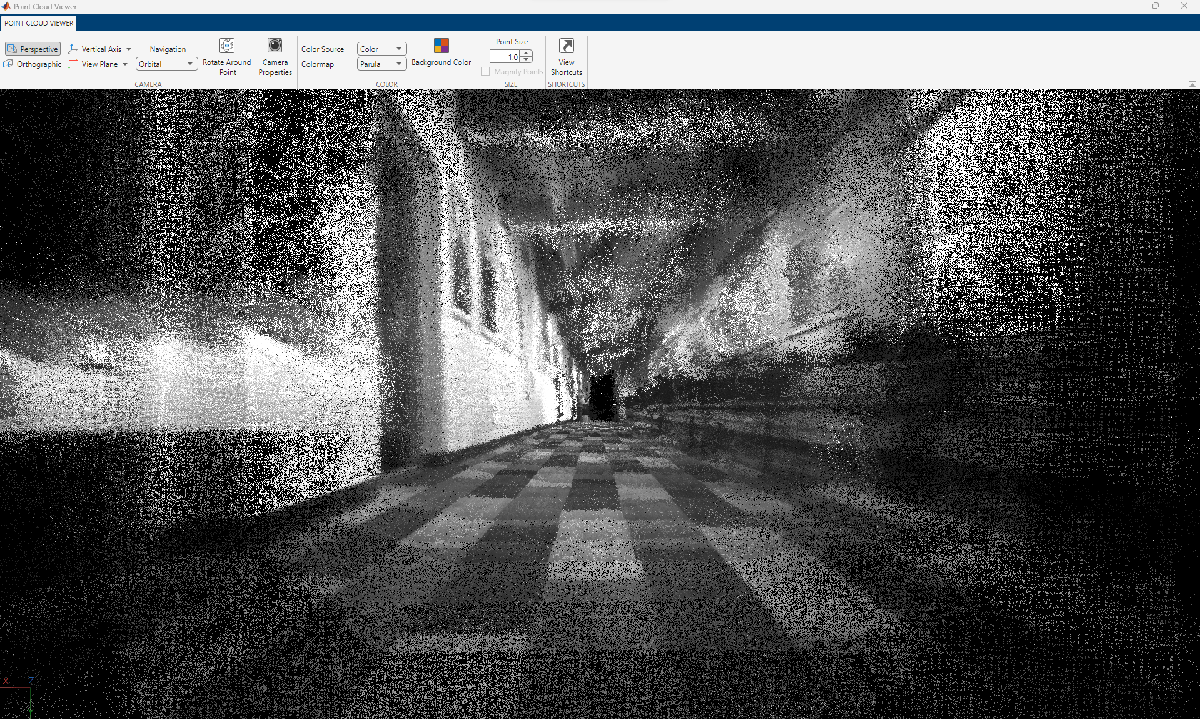
Visual SLAM with RGB-D Camera
Process RGB-D image data to build a map of an indoor environment and estimate the trajectory of the camera.
Monocular Visual-Inertial Odometry (VIO) Using Factor Graph
Perform monocular visual-inertial odometry using tightly coupled factor graph optimization.