vSLAM
视觉同步定位与地图构建 (vSLAM) 指计算相机相对于其周围环境的位置和方向并同时进行环境地图构建的过程。该过程仅使用来自相机的视觉输入。视觉 SLAM 的应用包括增强现实、机器人和自动驾驶。视觉-惯性 SLAM (viSLAM) 是将来自相机的视觉输入与来自 IMU 的位置数据进行融合以改进 SLAM 结果的过程。有关详细信息,请参阅Implement Visual SLAM in MATLAB。
函数
主题
- Implement Visual SLAM in MATLAB
Understand the visual simultaneous localization and mapping (vSLAM) workflow and how to implement it using MATLAB.
- Choose SLAM Workflow Based on Sensor Data
Choose the right simultaneous localization and mapping (SLAM) workflow and find topics, examples, and supported features.
- Develop Visual SLAM Algorithm Using Unreal Engine Simulation (Automated Driving Toolbox)
Develop a visual simultaneous localization and mapping (SLAM) algorithm using image data from the Unreal Engine® simulation environment.
精选示例
Simulate RGB-D Visual SLAM System with Cosimulation in Gazebo and Simulink
Simulates an RGB-D visual simultaneous localization and mapping (SLAM) system to estimate the camera poses using data from a mobile robot in Gazebo.
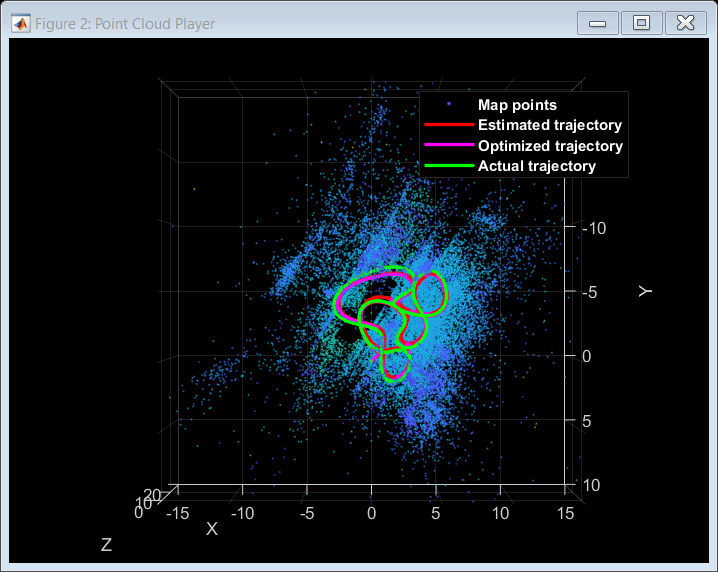
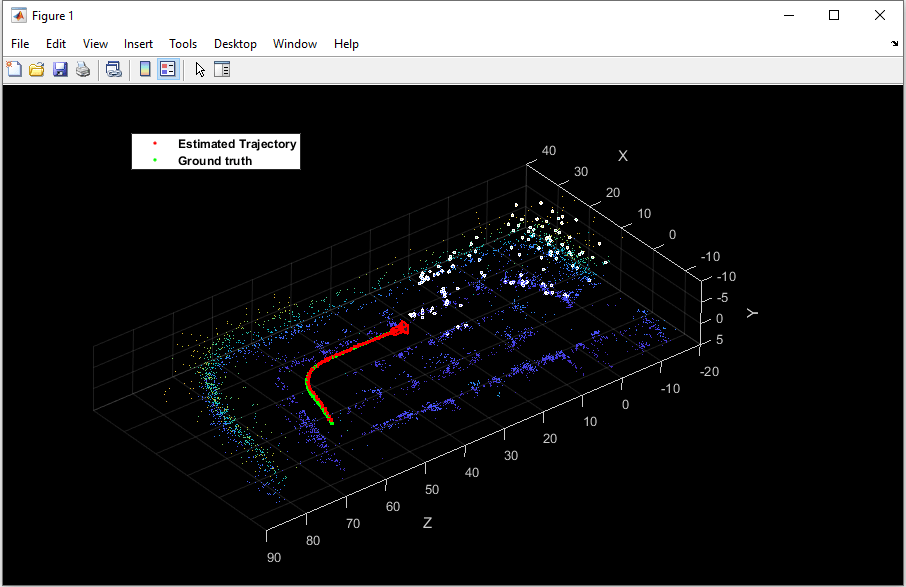
Monocular Visual-Inertial SLAM
Perform SLAM by combining images captured by a monocular camera with measurements from an IMU sensor.
Performant and Deployable Monocular Visual SLAM
Use visual inputs from a camera to perform vSLAM and generate multi-threaded C/C++ code.
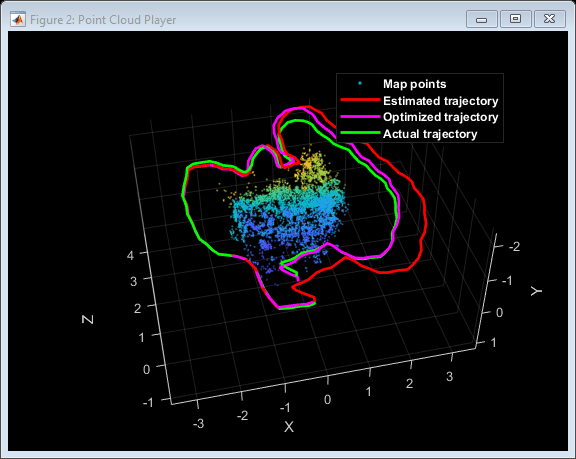
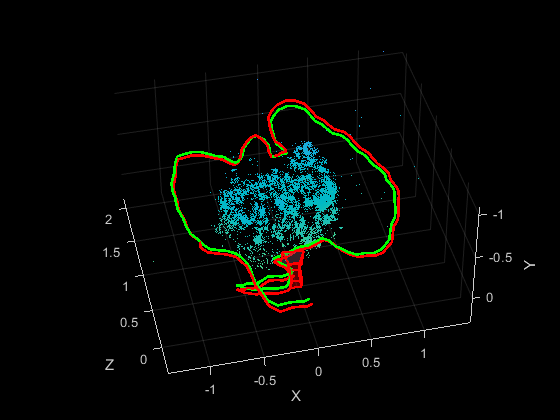
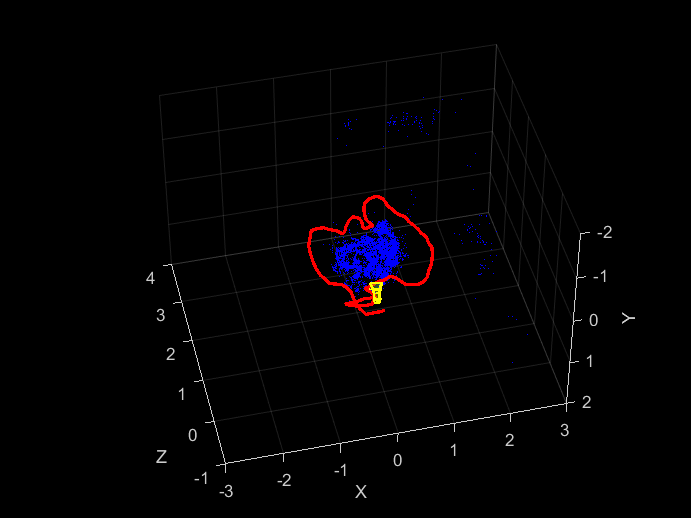
Monocular Visual Simultaneous Localization and Mapping
Visual simultaneous localization and mapping (vSLAM).
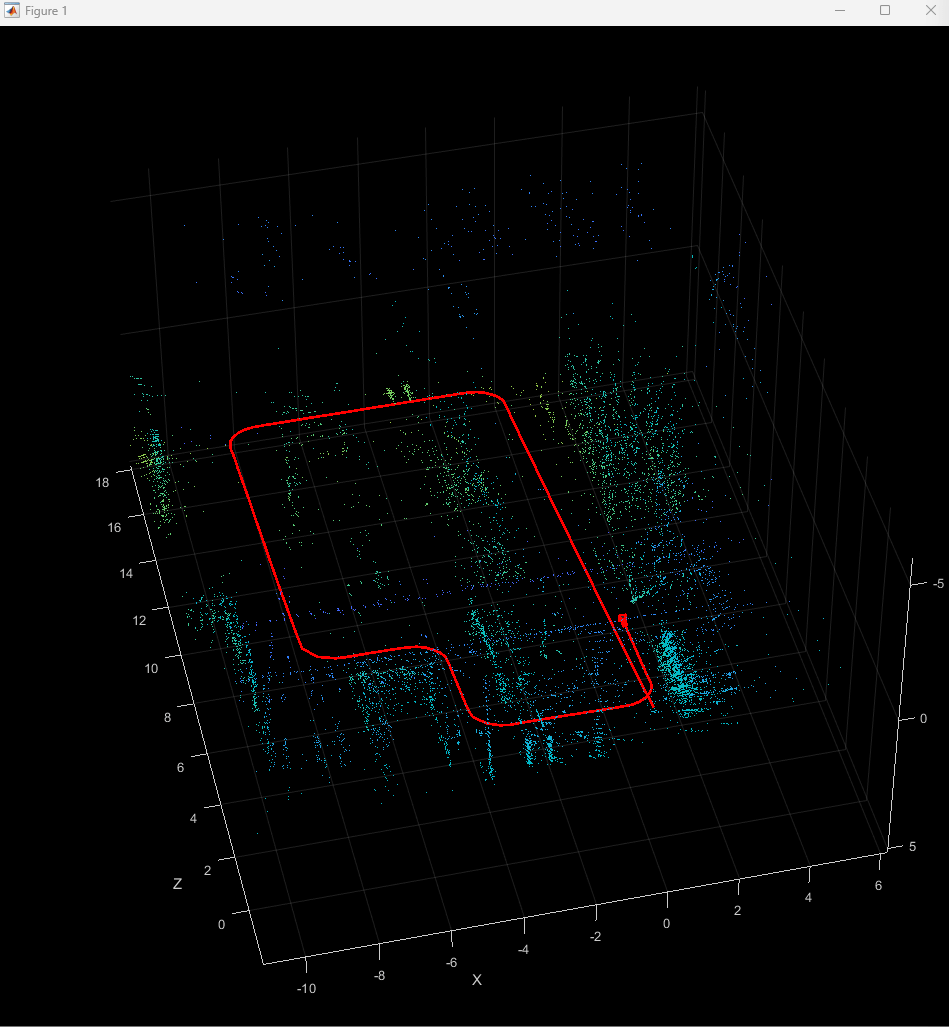
Performant and Deployable Stereo Visual SLAM with Fisheye Images
Use fisheye image data from a stereo camera to perform VSLAM and generate multi-threaded C/C++ code.
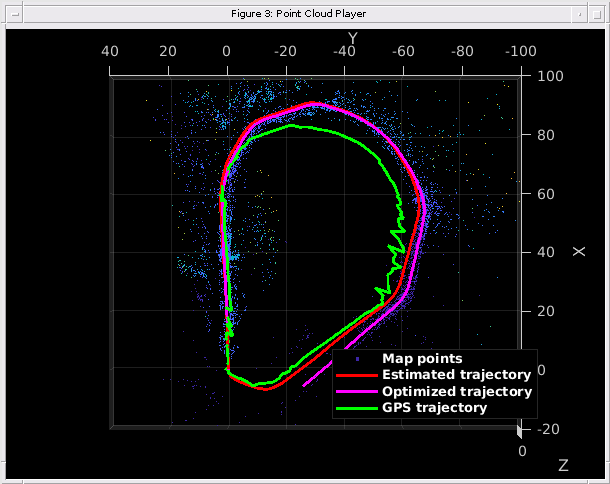
Stereo Visual Simultaneous Localization and Mapping
Process image data from a stereo camera to build a map of an outdoor environment and estimate the trajectory of the camera.
Build and Deploy Visual SLAM Algorithm with ROS in MATLAB
Implement and generate C ++ code for a vSLAM algorithm that estimates poses for the TUM RGB-D Benchmark and deploy as an ROS node to a remote device.
Visual Localization in a Parking Lot
Develop a visual localization system using synthetic image data from the Unreal Engine® simulation environment.
Stereo Visual SLAM for UAV Navigation in 3D Simulation
Develop a visual SLAM algorithm for a UAV equipped with a stereo camera.