点云处理
点云是三维空间中的一组数据点。这些点共同构成一个三维形状或目标。数据集中的每个点由 x、y 和 z 几何坐标表示。点云可用于将大量单个空间测量值组合成一个数据集,该数据集可表示为一个可描述的目标。点云处理用于机器人导航和感知、深度估计、立体视觉、视觉配准以及高级驾驶辅助系统 (ADAS)。Computer Vision Toolbox™ 算法提供点云处理功能,用于对点云进行下采样、去噪和变换。该工具箱还提供点云配准、三维点云的几何形状拟合,以及读取、写入、存储、显示和比较点云的功能。您可以合并多个点云来重建一个三维场景,或使用配准的点云构建地图,检测闭环,优化地图以校正漂移,以及在预置的地图中执行定位。有关详细信息,请参阅Implement Point Cloud SLAM in MATLAB。
要执行点云配准,即将两个或多个点云对齐到单个坐标系的过程,通常需要先将一个点云作为参考,即固定点云,然后将其他点云(即移动点云)与之对齐。点云的绝对位姿指的是点云相对于参考系(通常称为世界坐标系)的全局位置和方向。Computer Vision Toolbox 提供了各种配准方法,用于将移动点云配准到固定点云。这些方法包括迭代最近点 (ICP)、正态分布变换 (NDT)、相位相关和相干点漂移 (CPD)。您还可以使用激光雷达配准分析器 (Lidar Toolbox)以交互方式进行配准,并比较使用不同配准方法、调节参数和预处理步骤所得的结果。
函数
模块
主题
- Choose a Point Cloud Viewer
Compare visualization functions.
- Choose SLAM Workflow Based on Sensor Data
Choose the right simultaneous localization and mapping (SLAM) workflow and find topics, examples, and supported features.
- Implement Point Cloud SLAM in MATLAB
Understand point cloud registration and mapping workflow.
- Getting Started with Point Clouds Using Deep Learning
Understand how to use point clouds for deep learning.
- The PLY Format
The Stanford Triangle Format.
- Getting Started with Point Clouds Using Deep Learning
Understand how to use point clouds for deep learning.
- Choose Function to Visualize Detected Objects
Compare visualization functions.
- Labeling, Segmentation, and Detection (Lidar Toolbox)
Label, segment, detect, and classify objects in point cloud data using deep learning and geometric algorithms
精选示例
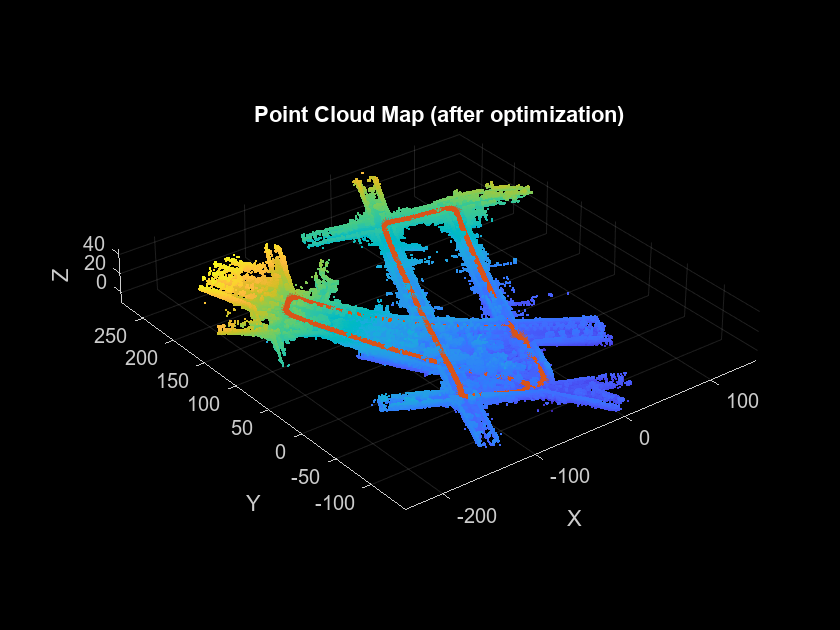
Build a Map from Lidar Data Using SLAM
Process lidar data to build a map and estimate a vehicle trajectory using simultaneous localization and mapping.
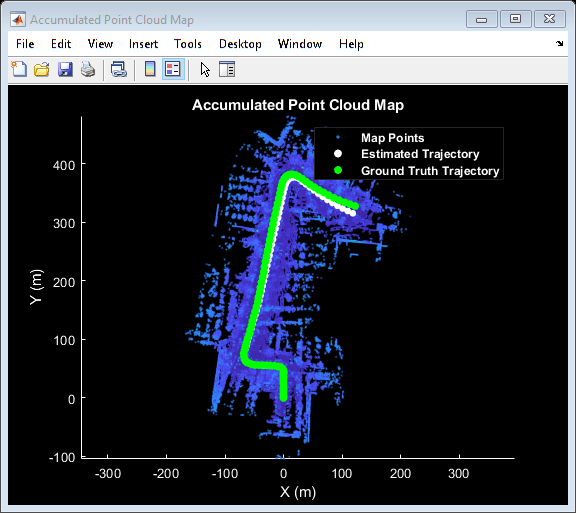
Build a Map from Lidar Data Using SLAM on GPU
Perform 3-D simultaneous localization and mapping (SLAM) on an NVIDIA® GPU.
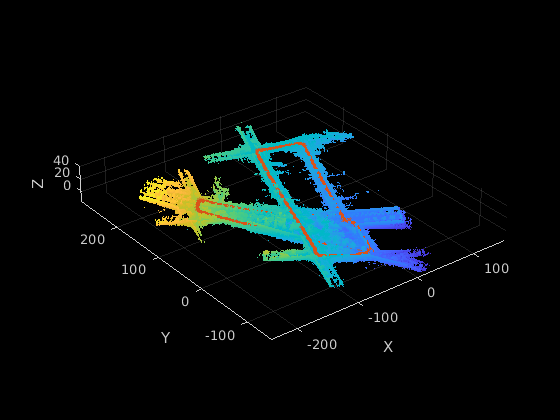
Build a Map from Lidar Data
Process 3-D lidar sensor data to progressively build a map, with assistance from inertial measurement unit (IMU) readings.
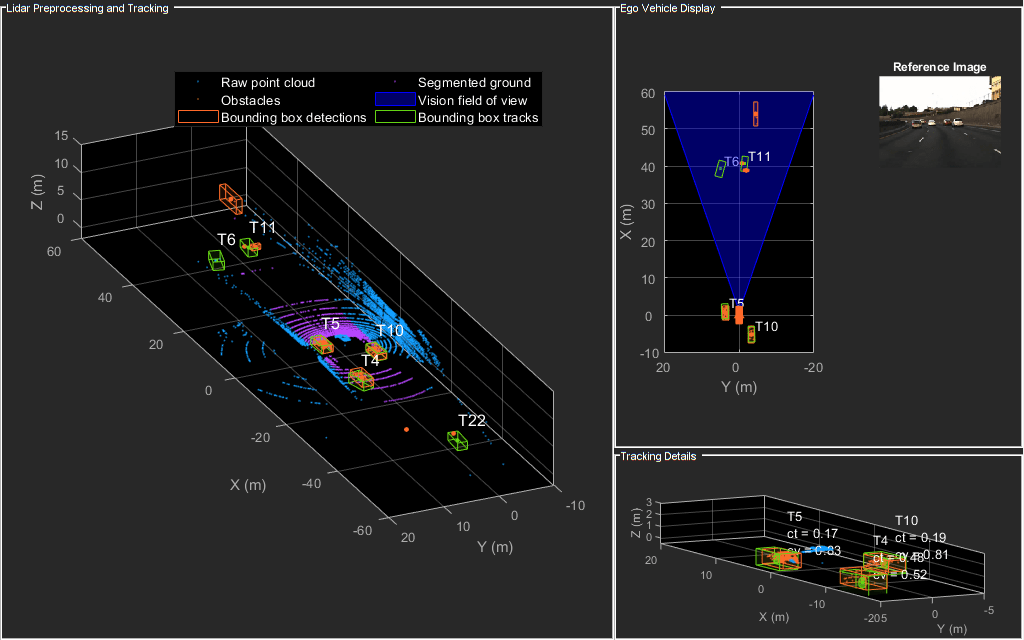
Detect and Track Vehicles Using Lidar Data
Track vehicles using measurements from a lidar sensor mounted on top of an ego vehicle.

Train Classification Network to Classify Object in 3-D Point Cloud
Train a classification network to classify objects in a 3-D point cloud.

三维点云配准与拼接
此示例说明如何使用迭代最近点 (ICP) 算法组合多个点云以重新构造三维场景。然后,它说明如何利用点云中可用的颜色信息提升场景的准确度。

Design Lidar SLAM Algorithm Using Unreal Engine Simulation Environment
Record synthetic sensor data from a 3-D simulation environment, and develop a simultaneous localization and mapping (SLAM) algorithm using the recorded data.

Ground Plane and Obstacle Detection Using Lidar
Process 3-D lidar data from a sensor mounted on a vehicle by segmenting the ground plane and finding nearby obstacles.