运动重建
基于多个视图进行三维重建
运动重建 (SfM) 是基于一组二维图像估计场景的三维结构的过程。有关详细信息,请参阅Implement Visual SLAM in MATLAB。
函数
主题
基础知识
- 坐标系
指定像素索引、空间坐标和三维坐标系。 - Point Feature Types
Choose functions that return and accept points objects for several types of features. - Local Feature Detection and Extraction
Learn the benefits and applications of local feature detection and extraction. - What Is Structure from Motion?
Estimate three-dimensional structures from two-dimensional image sequences.
相机标定 App
- Using the Single Camera Calibrator App
Prepare camera calibration images and estimate camera intrinsic parameters. - Using the Stereo Camera Calibrator App
Calibrate a stereo camera, which you can then use to recover depth from images.
精选示例
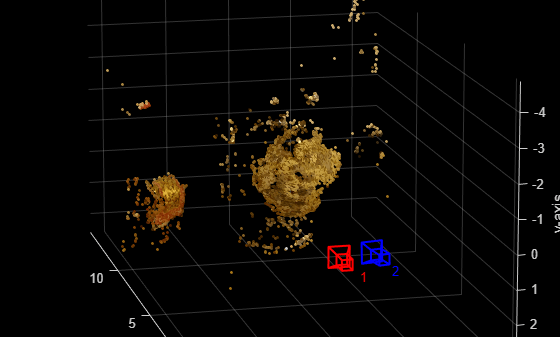
Structure from Motion from Two Views
Estimate 3-D structure of a scene from a set of 2-D images.
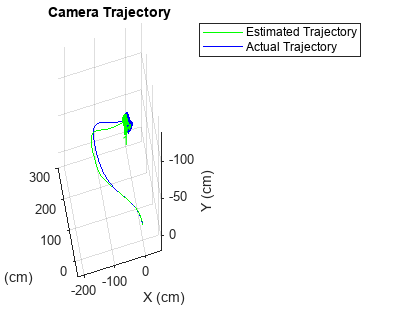
Monocular Visual Odometry
Determine location and orientation of a camera by analyzing a sequence of images.