Raised Cosine Receive Filter
Apply matched filtering using raised cosine FIR filter
Libraries:
Communications Toolbox /
Comm Filters
Communications Toolbox HDL Support /
Comm Filters
Description
The Raised Cosine Receive Filter block filters the input signal using a raised cosine finite impulse response (FIR) filter and optionally decimates the filtered signal. The FIR filter has (Filter span in symbols × Input samples per symbol + 1) tap coefficients. The block icon shows the impulse response of the filter. For more information, see Algorithms.
Examples
The Raised Cosine Transmit Filter and Raised Cosine Receive Filter blocks are designed for raised cosine (RC) filtering. Each block can apply a square-root raised cosine (RRC) filter or a raised cosine filter to a signal. You can vary the roll-off factor and span of the filter.
The Raised Cosine Transmit Filter and Raised Cosine Receive Filter blocks are tailored for use at the transmitter and receiver, respectively. The transmit filter upsamples (interpolates) the output signal. The receive filter expects its input signal to be upsampled and downsamples (decimates) the output signal, based on the configured settings of the block.
The raised cosine transmit and receive filter blocks each introduce a propagation delay, as described in Group Delay.
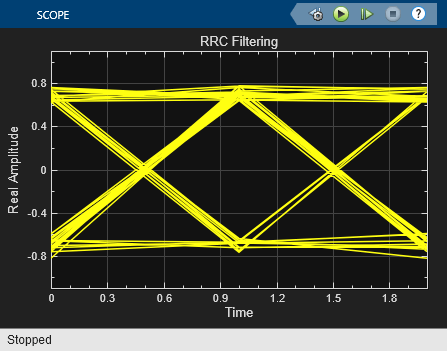
The doc_rrcfiltercompare.slx model shows how to split the filtering equally between the transmitter and the receiver by using a pair of square root raised cosine filters. The use of a matched pair of square root raised cosine filters is equivalent to a single normal raised cosine filter. The filters share the same span and use the same number samples per symbol but the two filter blocks on the upper path have a square root shape and the single filter block on the lower path has the normal shape.
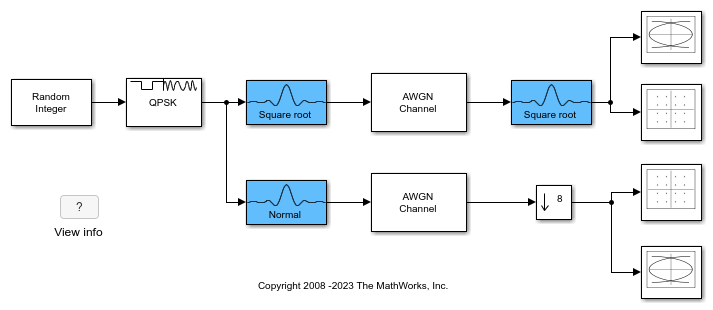
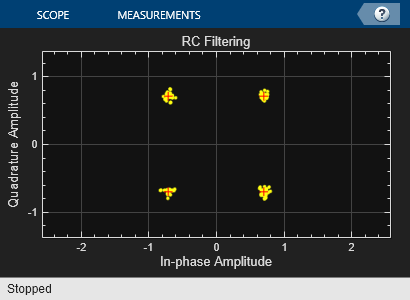
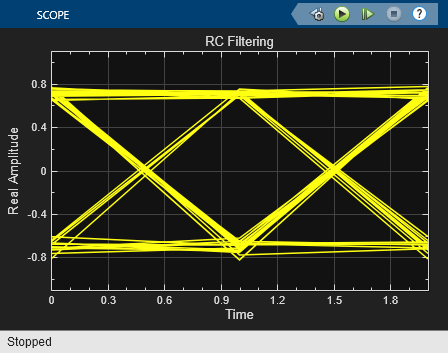
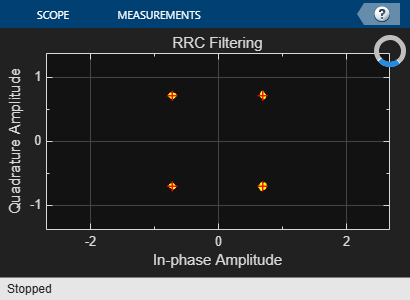
Run the model and observe the eye and constellation diagrams. The performance is nearly identical for the two methods. Note that the limited impulse response of practical square root raised cosine filters causes a slight difference between the response of two cascaded square root raised cosine filters and the response of one raised cosine filter.
Apply raised cosine matched filtering to a modulated signal by applying transmit and receive root raised cosine (RRC) filtering to the input signal. Demonstrate input signal power adjustment for correct SNR and the delay adjustment for correct error rate calculation.
The cm_tx_rx_rrc_filter model outputs frames of random integers by using a Random Integer Generator block. The frames of data pass through a QPSK Modulator Baseband block, Raised Cosine Transmit Filter, AWGN Channel block, Raised Cosine Receive Filter, and QPSK Demodulator Baseband block. Separate Error Rate Calculation blocks compute the bit error rate after QPSK demodulation, with and without accounting for the delay of the received signal due to the transmit and receive filtering.
The model initializes the variables that configure block parameters by using the PreLoadFcn callback function. For more information, see Model Callbacks (Simulink). The model demonstrates configuration of parameters to set the input signal power level for AWGN based on filter oversampling, and to set the delay for the error rate calculation path based on the filter delay.
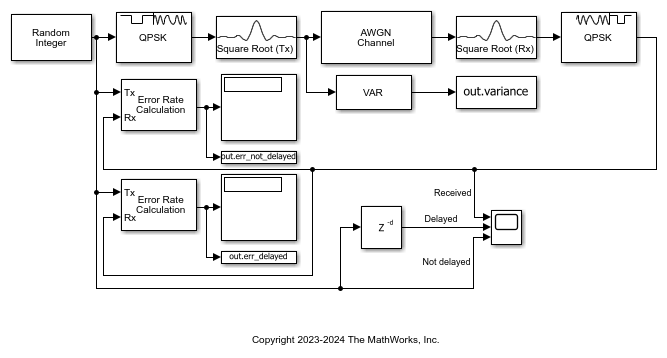
The QPSK-modulated signal has unity power, but signal oversampling by the transmit RRC filtering reduces the signal level by the oversampling rate. To apply the correct noise level, you must adjust the input signal power in the AWGN block to account for the reduced signal level due to oversampling by the filter. A Variance block computes a variance to be approximately one over the oversampling rate, 1/8.
Computed variance = 0.1250
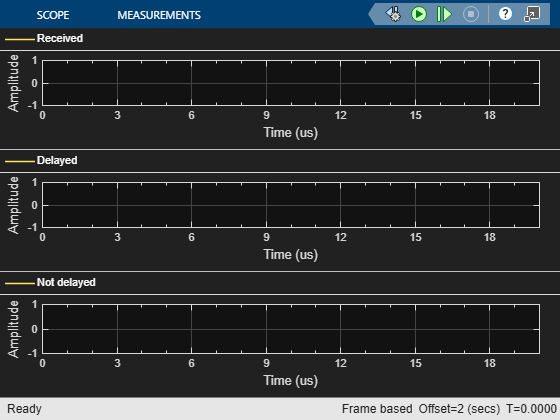
A Time Scope plots the Received, Delayed, and Not delayed signals. The Delayed signal aligns with the Received signal, but the Not delayed signal is shifted by 10 samples. The error rate calculation shows the correct BER when you account for the filter delay.
Delay not accounted for: BER = 0.75 Delay accounted for: BER = 0.00461
Recover frame synchronization in a QPSK system impaired by a variable timing error. The example shows the benefit of performing symbol synchronization to assist the frame synchronization.
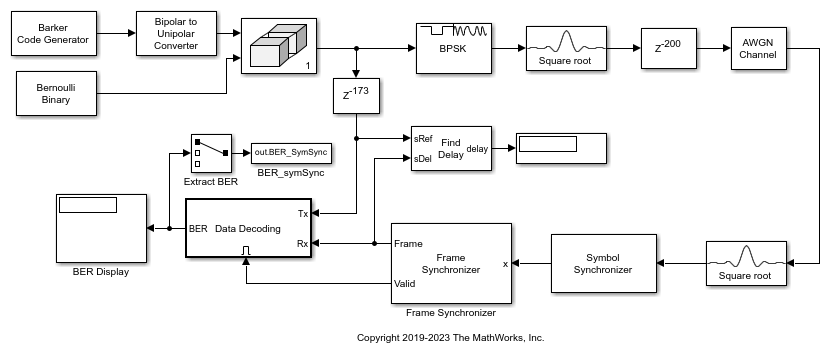
The cm_ex_symbol_frame_sync model compares frame synchronization performance with and without symbol synchronization. The Variable Fractional Delay block introduces a varying timing error to a root raised cosine (RRC) filtered QPSK signal. After the AWGN block, the receive path is duplicated to compare performance with and without a Symbol Synchronizer block in the path. The Symbol Synchronizer block corrects for clock skew between the transmitter and receiver, aligning the output signal with a valid clock reference. For the timing error conditions in this example, the symbol synchronizer returns a vector containing 99, 100, or 101 symbols for a 200-sample input vector.
The Frame Synchronizer block aligns the symbol stream along correct frame boundaries using the frame header present in the signal. It also provides the valid frame indicator signal to the BER Data Decoding subsystem, which calculates the bit error rate (BER). To avoid calculating the BER on nonvalid frames, the BER Data Decoding subsystem regenerates the input data bits rather than using the Bit Generation block output.
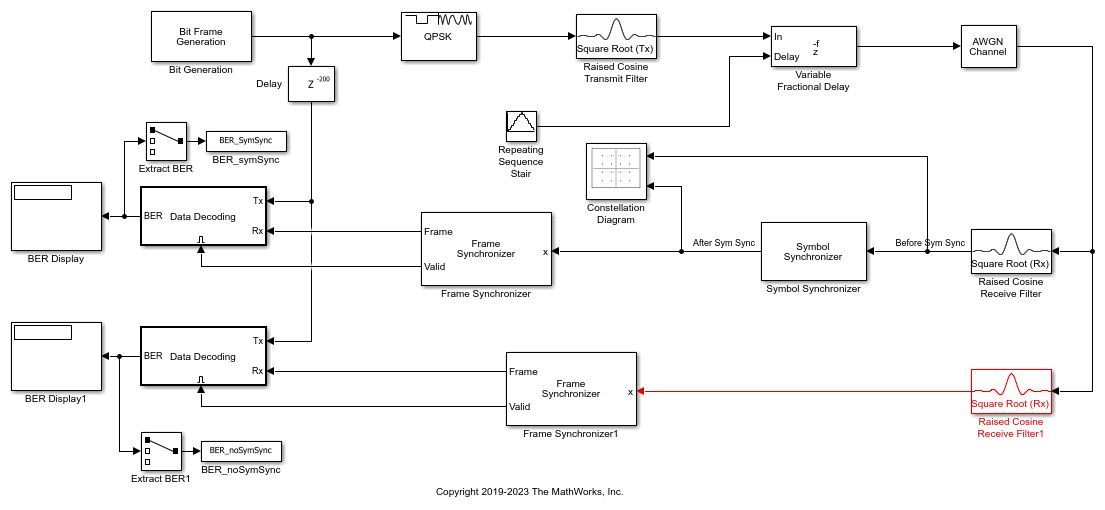
For a 20 dB signal-to-noise ratio and variable timing error in the range of [0, 0.9] samples, signal recovery is successful on the receiver path that includes symbol synchronization. The timing error varies over time, causing the constellation to oscillate between corrupted and clean states as seen in the Before Sym Sync signal in the Constellation Diagram block. The After Sym Sync signal in the constellation diagram shows that the symbol synchronizer removes the variable timing error signal impairment.
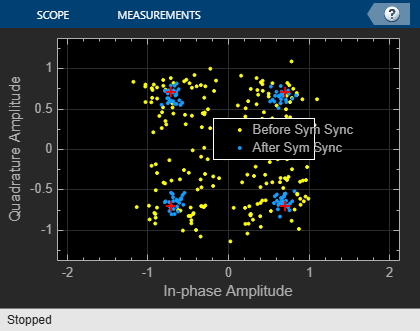
The BER with and without symbol synchronization show the performance improvement due to the Symbol Synchronizer block.
Error rate with symbol synchronization: 0.000 Error rate without symbol synchronization: 0.010
Extended Examples
Frame Synchronization Using Barker Code Preamble
Use a length 13 Barker code frame preamble for frame synchronization of data bits.
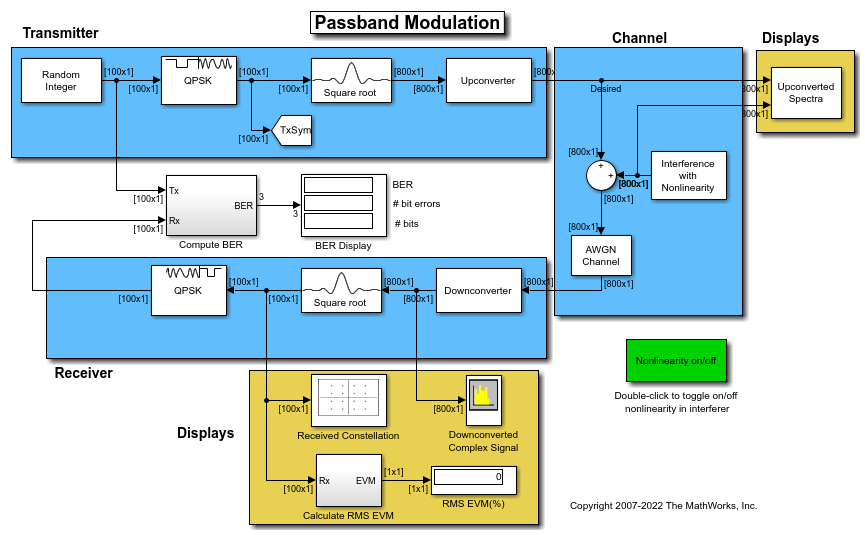
Passband Modulation
Simulate passband modulation by multiplying a modulated complex signal with a complex sine wave to perform frequency upconversion.
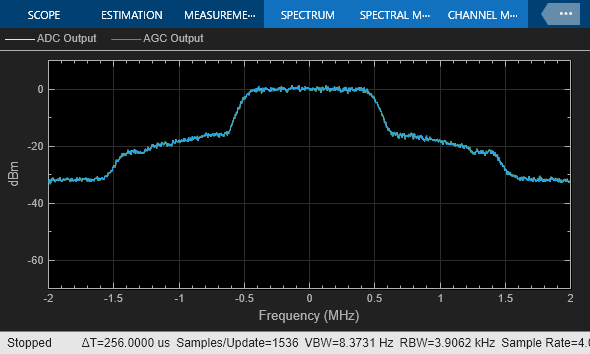
Impact of RF Effects on Communication System Performance
Model thermal noise, phase noise, and nonlinearity impairments of an RF transceiver in Simulink®.
Ports
Input
Output
Parameters
Block Characteristics
More About
The Data Type Assistant helps you set data
attributes. To use the Data Type Assistant, click ![]() . For more information, see Specify Data Types Using Data Type Assistant (Simulink).
. For more information, see Specify Data Types Using Data Type Assistant (Simulink).
Tips
Exporting Filter Coefficients to the MATLAB Workspace
To examine or manipulate the coefficients of the filter that this block designs, select Export filter coefficients to workspace. Set the Coefficient variable name parameter to the name of a variable that you want the block to create in the MATLAB workspace. Running the simulation causes the block to create the variable, overwriting any previous contents in case the variable already exists.