Lane Following Systems
Automated lane-following system, also known as automated lane keeping system (ALKS), assists autonomous vehicles to travel within a marked lane and avoid collision with a lead vehicle in the same lane. You can model a lane-following system for cars and trucks by integrating the lane detection, vehicle detection, sensor fusion, decision logic, and controls components. Further, you can perform code generation, software-in-the-loop (SIL) validation, and hardware-in-the-loop (HIL) validation of these components. These examples show how to design, test, and validate lane following model and its components for highway driving scenarios.
Topics
Get Started
- Overview of Lane Following System
Learn the basics of modeling and testing automated lane keeping system (ALKS).
Lane Following System for Cars
- Highway Lane Following
Simulate a lane-following controller and monocular camera-based perception algorithm in the Unreal Engine® simulation environment. - Automate Testing for Highway Lane Following
Automating the testing of the components and generated code for a lane-following application.
Lane Following System for Trucks
- Lane-Keeping System for Self-Driving Trucks
Design a lane-keeping system for self-driving trucks in Simulink® and simulate it with RoadRunner Scenario.
Lane Detection
- Design Lane Marker Detector Using Unreal Engine Simulation Environment
Use the Unreal Engine simulation environment to record synthetic sensor data and develop and test a lane marker detection system. - Generate Code for Lane Marker Detector
Generate C++ code for lane marker detector and validate the functional equivalence using software-in-the-loop (SIL) simulation. - Automate Testing for Lane Marker Detector
Automate the testing of a lane marker detector algorithm and generated code.
Vehicle Detection
- Generate Code for Vision Vehicle Detector
Generate deployable code for a monocular-camera-based vehicle detector and validate the functional equivalence with simulation. - Automate Testing for Vision Vehicle Detector
Automate the testing of a vehicle detector and generated code.
Sensor Fusion and Tracking
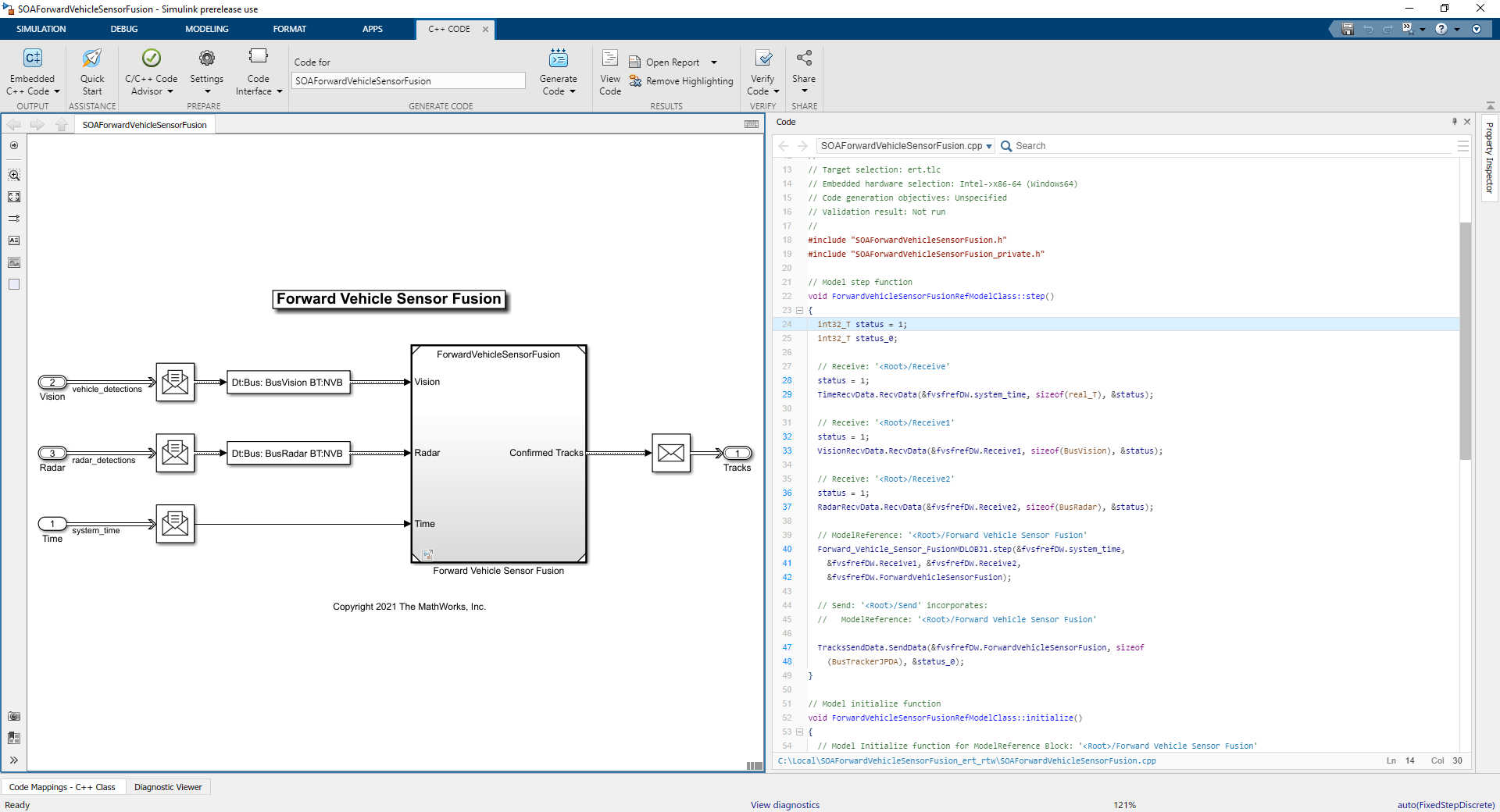
- Forward Vehicle Sensor Fusion
Simulate sensor fusion and tracking in a 3D simulation environment for automated driving applications. - Automate Testing for Forward Vehicle Sensor Fusion
Automate the testing of a forward vehicle sensor fusion component and generated code. - Automate Real-Time Testing for Forward Vehicle Sensor Fusion
Deploy and test forward vehicle sensor fusion component of highway lane following system in real-time. - Automate PIL Testing for Forward Vehicle Sensor Fusion
Automate processor-in-the-loop (PIL) testing of forward vehicle sensor fusion algorithm on NVIDIA® Jetson™ hardware. - Integrate and Verify C++ Code of Sensor Fusion Algorithm in Simulink
Integrate C++ code of a sensor fusion algorithm in Simulink and evaluate the performance of integrated algorithm.
Decision Logic and Control
- Lane Following Control with Sensor Fusion and Lane Detection
Simulate and generate code for an automotive lane-following controller. - Generate Code for Highway Lane Following Controller
Generate code for the lane following decision logic and controller, and validate the functional equivalence by using software-in-the-loop (SIL) simulation. - Automate Testing for Highway Lane Following Controller
Automate the testing of a lane following controller and generated code for highway lane following application. - Automate Real-Time Testing for Highway Lane Following Controller
Deploy and test highway lane following controller in real-time. - Automate Testing for Highway Lane Following Controls and Sensor Fusion
Integrate the sensor fusion and controls components of a highway lane following application and test the functionality of this integration. - Automate Real-Time Testing of Highway Lane Following Controller Using ASAM XIL
Deploy a highway lane following controller to a Speedgoat®real-time machine using ASAM® XIL standard.
Featured Examples
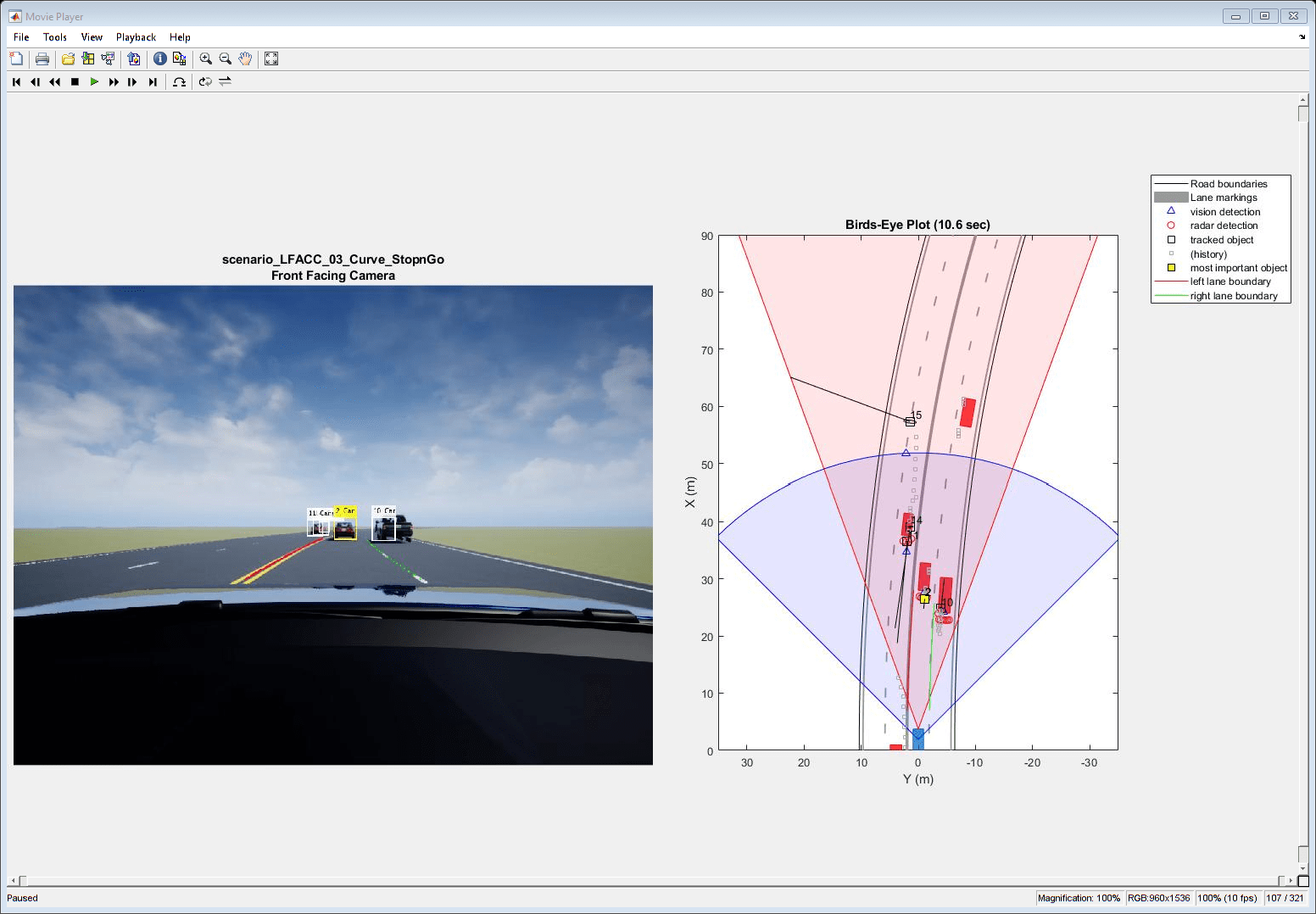
Highway Lane Following
Simulate a lane-following controller and monocular camera-based perception algorithm in the Unreal Engine simulation environment.
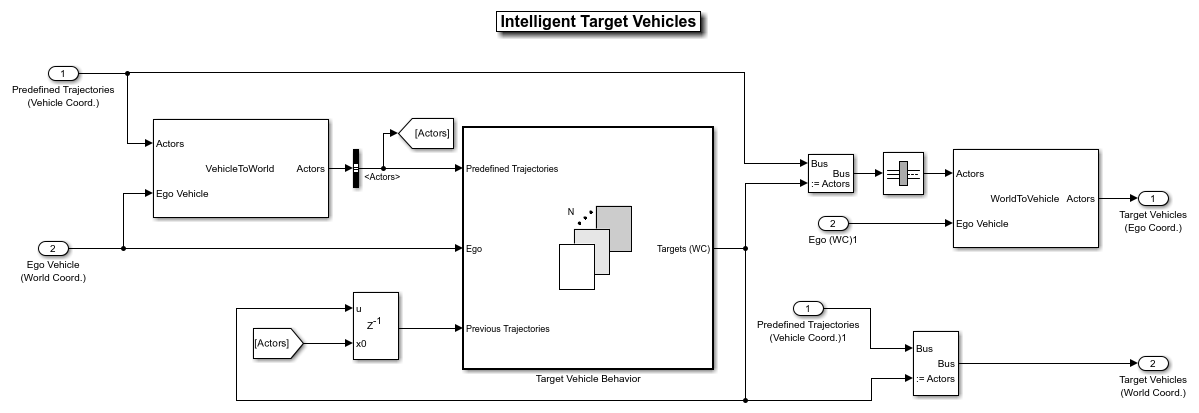
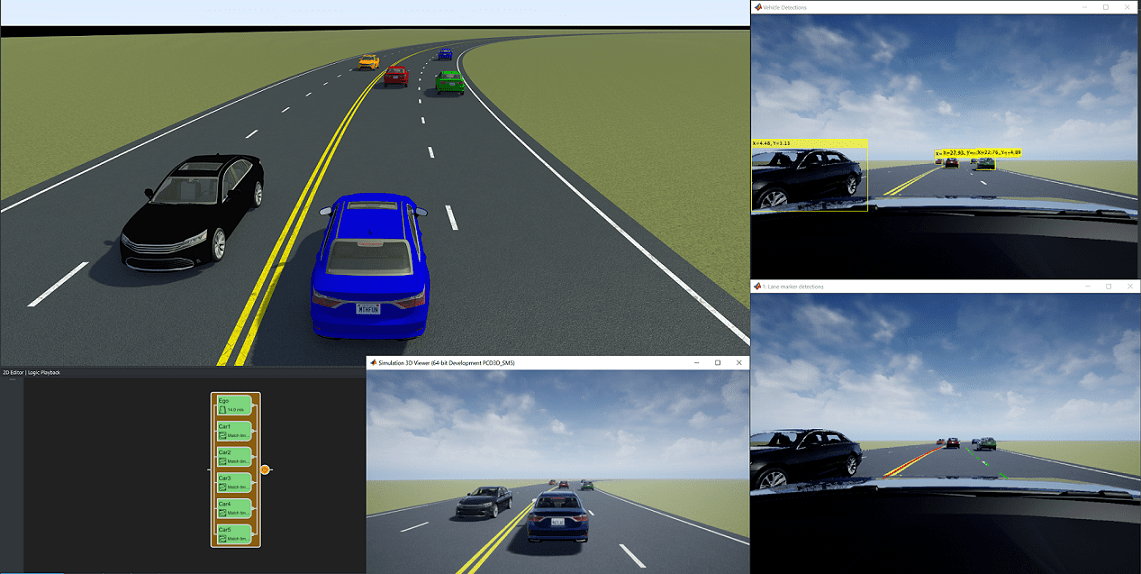
Highway Lane Following with Intelligent Vehicles
Simulate a lane following application in a scenario that contains intelligent target vehicles. The intelligent target vehicles are the non-ego vehicles in the scenario and are programmed to adapt their trajectories based on the behavior of its neighboring vehicles. In this example, you will:
Highway Lane Following with RoadRunner Scenario
Simulate highway lane following application, designed in Simulink, with RoadRunner Scenario.
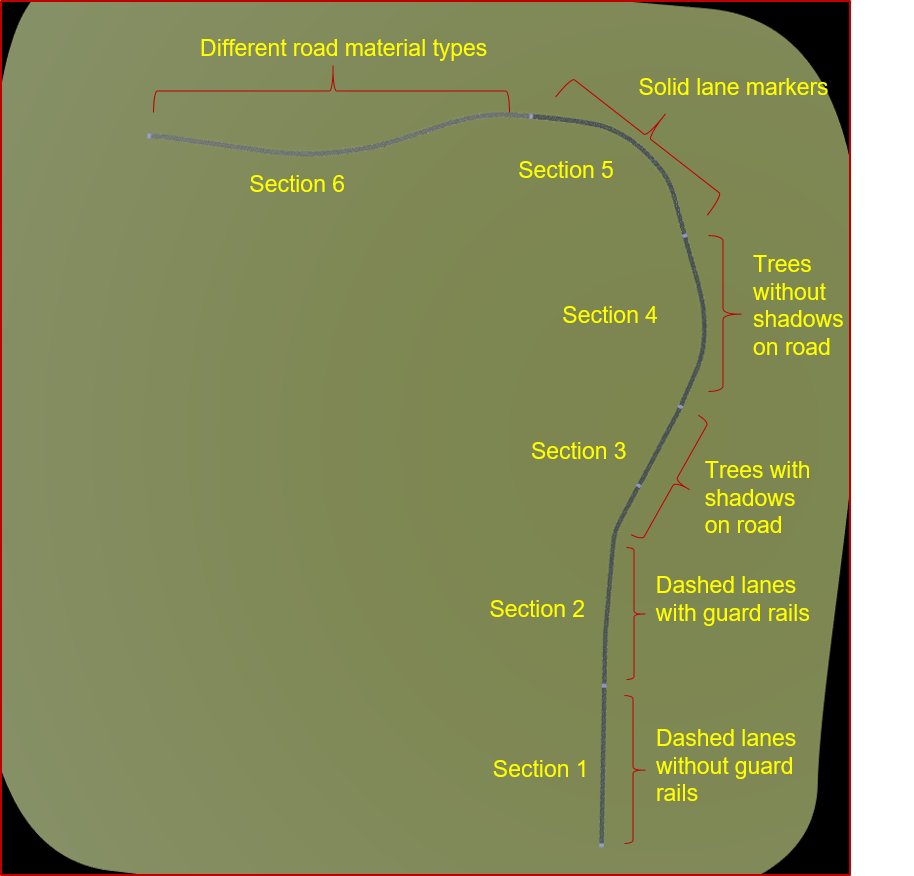
Highway Lane Following with RoadRunner Scene
Simulate a highway lane following application using a scene created in the RoadRunner 3D scene editing tool.
Generate C++ Message Interfaces for Lane Following Controls and Sensor Fusion
Generate code for message-based communication between components of a highway lane following system.

Lane Keeping Assist with Lane Detection
Simulate and generate code for an automotive lane keeping assist controller.
Lane-Keeping System for Self-Driving Trucks
Design a lane-keeping system for self-driving trucks in Simulink and simulate it with RoadRunner Scenario.
Select a Web Site
Choose a web site to get translated content where available and see local events and offers. Based on your location, we recommend that you select: United States.
You can also select a web site from the following list
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
Asia Pacific
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)