Mapping and Localization Using Vision and Lidar Data
Use simultaneous localization and mapping (SLAM) algorithms to build a map of the environment while estimating the pose of the ego vehicle at the same time. You can use SLAM algorithms with either visual or point cloud data. For more information on implementing visual SLAM using camera image data, see Implement Visual SLAM in MATLAB and Develop Visual SLAM Algorithm Using Unreal Engine Simulation. For more information on implementing point cloud SLAM using lidar data, see Implement Point Cloud SLAM in MATLAB and Design Lidar SLAM Algorithm Using Unreal Engine Simulation Environment.
You can use measurements from sensors such as inertial measurement units (IMU) and global positioning system (GPS) to improve the map building process with visual or lidar data. For an example, see Build a Map from Lidar Data.
In environments with known maps, you can localize the ego vehicle by estimating its pose relative to the map coordinate frame origin. For an example on localization using a known visual map, see Visual Localization in a Parking Lot. For an example on localization using a known point cloud map, see Lidar Localization with Unreal Engine Simulation.
In environments without known maps, you can use visual-inertial odometry by fusing visual and IMU data to estimate the pose of the ego vehicle relative to the starting pose. For an example, see Visual-Inertial Odometry Using Synthetic Data.
For an application of mapping and location algorithms to detect empty parking spots in a parking lot, see Perception-Based Parking Spot Detection Using Unreal Engine Simulation.
Functions
Topics
- Rotations, Orientations, and Quaternions for Automated Driving
Quaternions are four-part hypercomplex numbers that are used to describe three-dimensional rotations and orientations. Learn how to use them for automated driving applications.
- Implement Visual SLAM in MATLAB
Understand the visual simultaneous localization and mapping (vSLAM) workflow and how to implement it using MATLAB.
- Monocular Visual Simultaneous Localization and Mapping
Visual simultaneous localization and mapping (vSLAM).
- Implement Point Cloud SLAM in MATLAB
Understand point cloud registration and mapping workflow.
Featured Examples

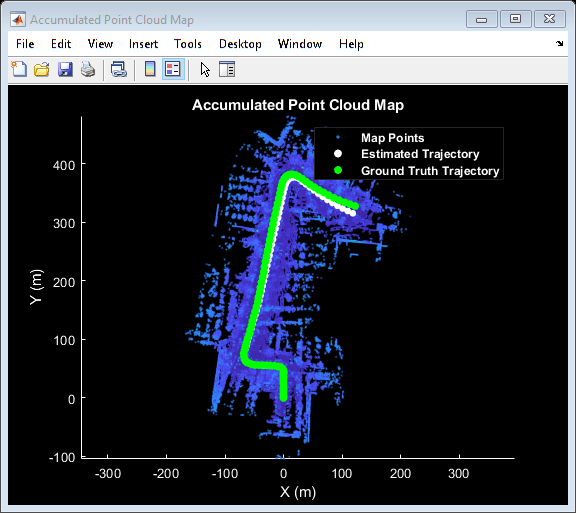
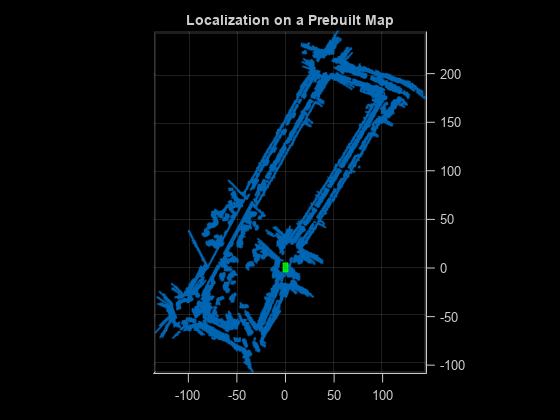
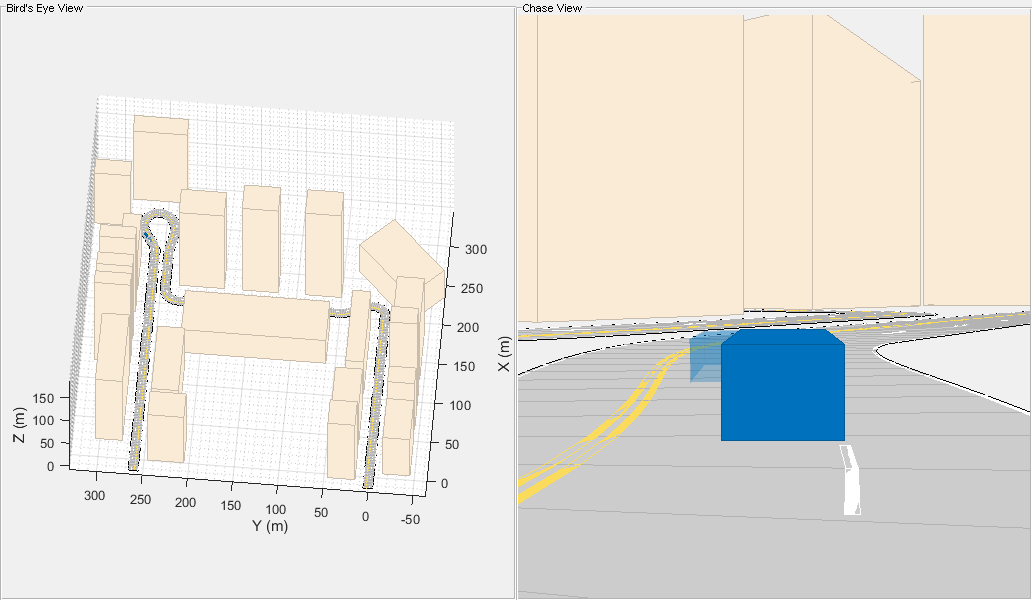
Lidar Localization with Unreal Engine Simulation
Develop and evaluate a lidar localization algorithm using synthetic lidar data from the Unreal Engine® simulation environment.
Visual Localization in a Parking Lot
Develop a visual localization system using synthetic image data from a parking lot scene in Unreal Engine environment.
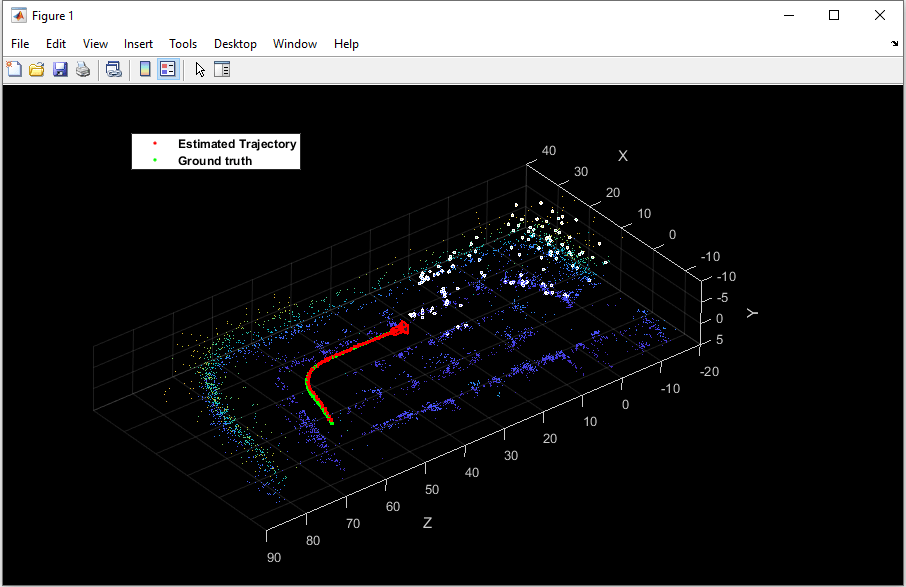
Develop Visual SLAM Algorithm Using Unreal Engine Simulation
Develop a visual simultaneous localization and mapping (SLAM) algorithm using image data from the Unreal Engine simulation environment.
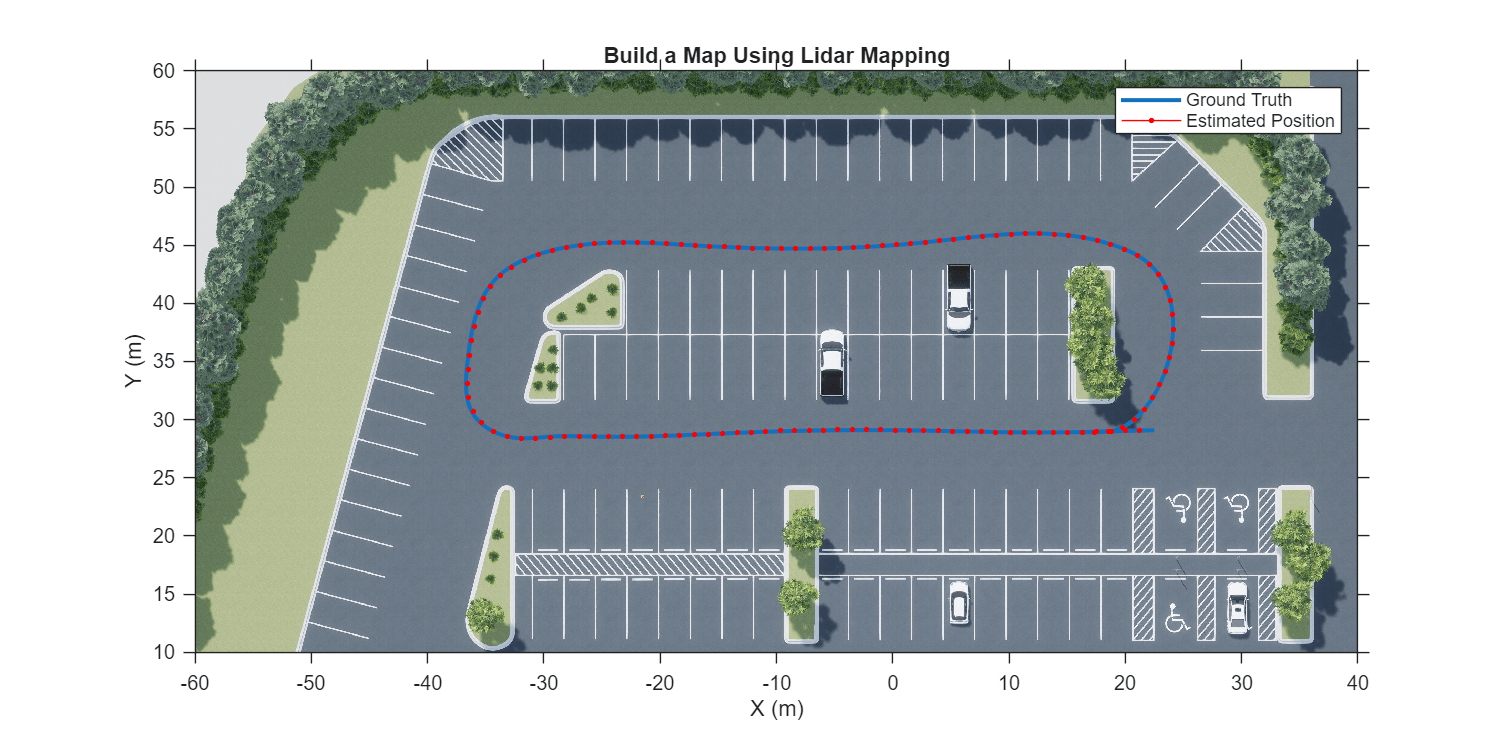
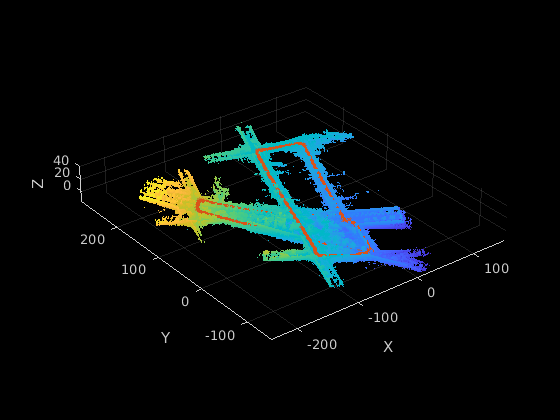
Build a Map from Lidar Data
Process 3-D lidar sensor data to progressively build a map, with assistance from inertial measurement unit (IMU) readings.

Design Lidar SLAM Algorithm Using Unreal Engine Simulation Environment
Develop a simultaneous localization and mapping algorithm using synthetic lidar sensor data recorded from the Unreal Engine simulation environment.

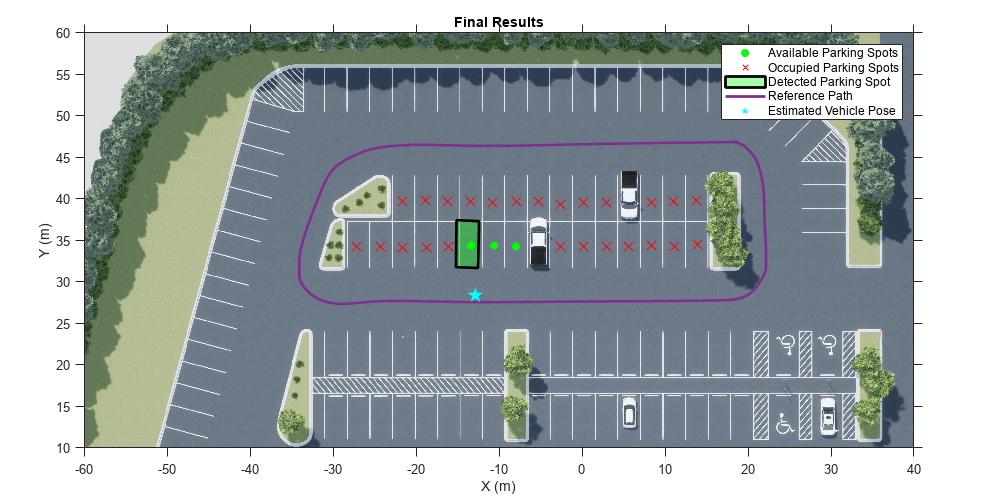
Perception-Based Parking Spot Detection Using Unreal Engine Simulation
Build a bird's-eye-view map of a parking lot using semantically segmented images from the ego vehicle camera, and detect empty parking spots from the map.
Perception Based Live Parking Spot Detection Using Unreal Engine Simulation
Develop a live parking spot detection system using deep learning and SLAM.
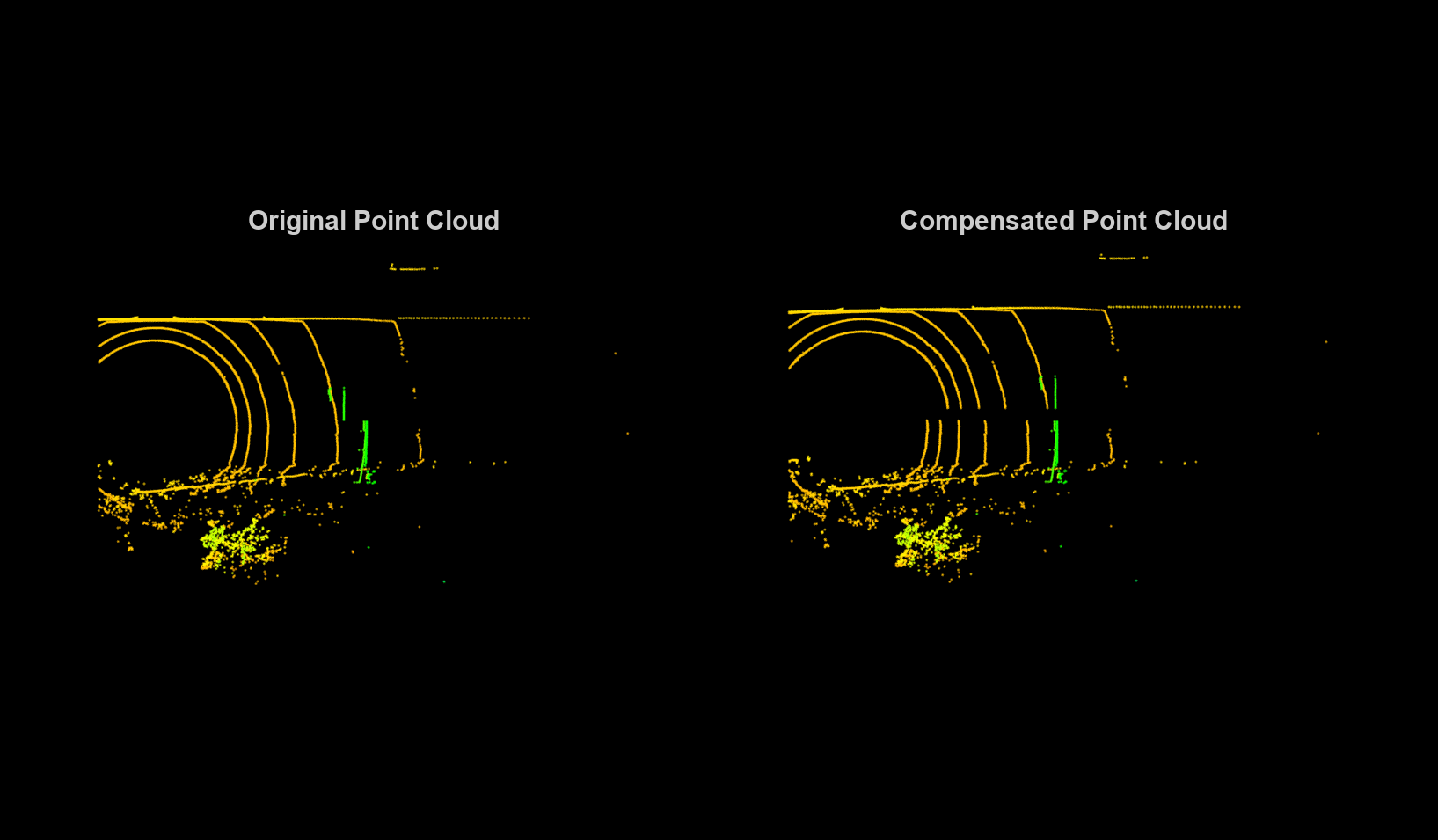
Motion Compensation in 3-D Lidar Point Clouds Using Sensor Fusion
Compensate point cloud distortion due to ego-vehicle motion by fusing GPS and IMU data.

PIL Verification of Generated Code for Map Creation Using Lidar SLAM
Design a lidar SLAM algorithm for map creation, generate embedded code of the algorithm, and verify it using processor-in-the-loop (PIL) simulation on NVIDIA® Jetson™ hardware.
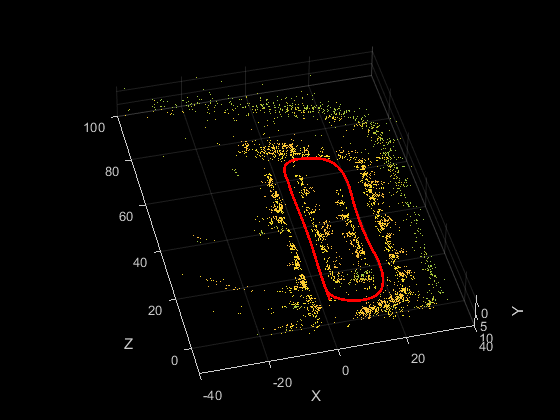
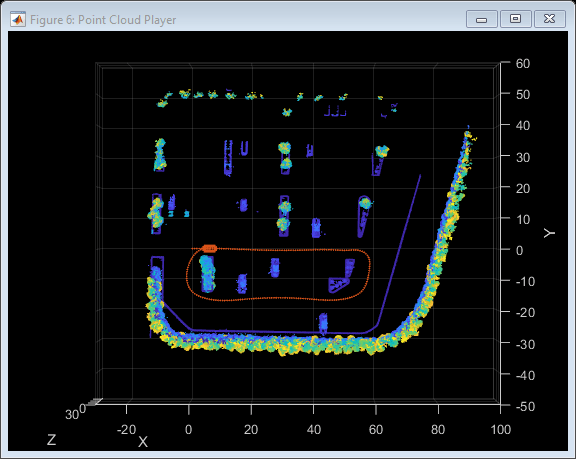
Build a Map with Lidar Odometry and Mapping (LOAM) Using Unreal Engine Simulation
Build a map with the lidar odometry and mapping (LOAM) [1] algorithm by using synthetic lidar data from the Unreal Engine® simulation environment. In this example, you learn how to:
Build Occupancy Map from 3-D Lidar Data Using SLAM
Build a 2-D Occupancy map from 3-D Lidar data using a simultaneous localization and mapping (SLAM) algorithm.
Build Map and Localize Using Segment Matching
Build a map with lidar data and localize the position of a vehicle on the map using
SegMatch, a place recognition algorithm based on segment
matching.
Visual-Inertial Odometry Using Synthetic Data
Estimate the position and orientation of a vehicle by using an inertial measurement unit (IMU) and a monocular camera.
Build a Map from Lidar Data Using SLAM on GPU
Perform 3-D simultaneous localization and mapping (SLAM) using generated code on an NVIDIA GPU.