estimateMonoCameraFromScene
Syntax
Description
[
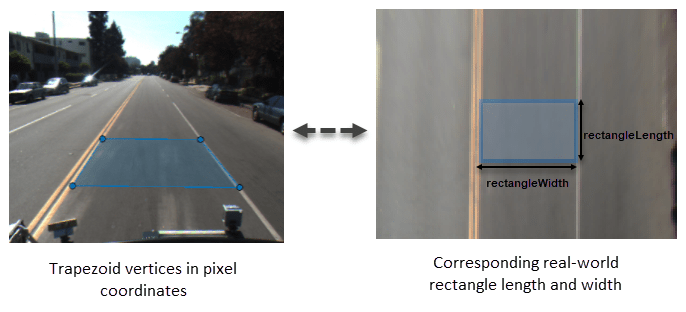
estimates the extrinsic and intrinsic parameters of a monocular camera from scene geometry.
Specify the pixel coordinates for a trapezoid on the scene image, along with the width and
length of the real-world rectangle that corresponds to that trapezoid. The returned
extrinsic parameters define the pitch, yaw, and roll rotation angles between the camera
coordinate system and vehicle coordinate system axes. The function also returns the height
of the camera above the ground, and the intrinsic parameters of the camera
pitch,yaw,roll,height,intrinsicsOut] = estimateMonoCameraFromScene(trapezoid,rectangleWidth,rectangleLength,imageSize)intrinsicsOut. Use these estimates to configure a monoCamera object when a formal calibration with a calibration pattern is not
possible. For more information on coordinate systems see, camera
coordinate system and vehicle coordinate
system.
[
specifies the intrinsic parameters of the camera pitch,yaw,roll,height,intrinsicsOut] = estimateMonoCameraFromScene(trapezoid,rectangleWidth,intrinsicsIn)intrinsicsIn instead
of the rectangle length and image size. When the camera intrinsic parameters are available,
use this syntax to improve the estimates of the extrinsic parameters.
Examples
Load a MAT file containing a scene image into the workspace.
load("doubleLaneImageData.mat");Specify the pixel coordinates of trapezoid vertices on the scene image that spans the width of two lanes. You must specify the vertices, in the clockwise or counterclockwise order, starting from the upper-left trapezoid vertex.
trapezoid = [208 456; 170 465; 699 467; 693 456];
Visualize the trapezoid vertices as annotations on the scene image. Note that the vertices in counterclockwise order.
doubleLaneImg = insertMarker(doubleLaneImg,trapezoid);
text_str = {'UL','LL','LR','UR'};
doubleLaneImg = insertText(doubleLaneImg,trapezoid+[5 5; 5 5; 5 5; 5 -25],text_str);
figure
imshow(doubleLaneImg)
Specify the dimensions of the real-world rectangle that corresponds to the trapezoid on the scene image.
rectangleWidth = 8; rectangleLength = 1.5;
Specify the size of the image.
imageSize = size(doubleLaneImg,[1 2]);
Estimate the extrinsic and intrisic camera parameters by using the estimateMonoCameraFromScene function. Display the estimated camera extrinsic and intrinsic parameters.
[pitch,yaw,roll,height,intrinsics] = estimateMonoCameraFromScene(trapezoid,rectangleWidth,rectangleLength,imageSize)
pitch = 0.3032
yaw = -0.1190
roll = 2.0457
height = 1.4508
intrinsics =
cameraIntrinsics with properties:
FocalLength: [1.0981e+03 1.0981e+03]
PrincipalPoint: [640 360]
ImageSize: [720 1280]
RadialDistortion: [0 0]
TangentialDistortion: [0 0]
Skew: 0
K: [3×3 double]
Obtain camera extrinsic parameters by specifying the scene geometry interactively on an image when camera intrinsic parameters are available. Then, use the estimated camera parameters to create a monoCamera object, and obtain a bird's-eye-view of the scene by using a birdsEyeView object.
Obtain Camera Parameters
Load the scene image. Use the known camera intrinsic parameters to create a cameraIntrinsics object.
Im = imread(fullfile(matlabroot, "toolbox", "driving", "core","drivingdata", "roadSequence", "f00014.png")); focalLength = [309.4362 344.2161]; principalPoint = [318.9034 257.5352]; imageSize = [480 640]; intrinsics = cameraIntrinsics(focalLength,principalPoint,imageSize);
Display the scene image. Move the four vertices of the trapezoid region of interest (ROI) interactively to specify the desired scene geometry. Then press Enter.
figure imshow(Im); title("Adjust the trapezoid ROI to select rectangular lane region, press Enter to continue"); vertices = [size(Im,2)/2 size(Im,1)/2;... size(Im,2)/2 size(Im,1)*3/4;... size(Im,2)*3/4 size(Im,1)*3/4;... size(Im,2)*3/4 size(Im,1)/2]; roi = drawpolygon(Position=vertices,FaceAlpha=0.2,LineWidth=1); % Wait until Enter is pressed wasButtonPressed = false; while ~wasButtonPressed wasButtonPressed = waitforbuttonpress; if double(get(gcf,"currentcharacter")) ~= 13 wasButtonPressed = false; end end
![{"String":"Figure contains an axes object. The axes object with title Adjust the trapezoid ROI to select rectangular lane region, press Enter to continue contains 2 objects of type image, images.roi.polygon.","Tex":"Adjust the trapezoid ROI to select rectangular lane region, press Enter to continue","LaTex":[]}](../../examples/driving/win64/ObtainCameraExtrinsicsBySpecifyingSceneGeomteryOnImageExample_01.png)
Specify the dimensions of the real-world rectangle that corresponds to the trapezoid you specified on the scene image. Because you know the camera intrinsic parameters, you can estimate the extrinsic parameters by specifying only the width of the rectangle.
rectangleWidth = 3.6;
Estimate the camera extrinsic parameters to obtain the pitch, roll, yaw, and height of the camera mounted on the vehicle.
[pitchCal,yawCal,rollCal,heightCal] = estimateMonoCameraFromScene(roi.Position,rectangleWidth,intrinsics);
Transform Road Image to Bird's-Eye-View Image
Create a monoCamera object using the estimated camera extrinsic parameters and the known intrinsic parameters.
sensor = monoCamera(intrinsics,heightCal,Pitch=pitchCal,Roll=rollCal,Yaw=yawCal);
Define the area in front of the camera that you want to transform into a bird's-eye view. Specify an area from 3 to 30 meters in front of the camera, with 6 meters to either side of the camera.
distAhead = 40; spaceToOneSide = 6; bottomOffset = 3; outView = [bottomOffset distAhead -spaceToOneSide spaceToOneSide];
Set the output image width to 250 pixels. Compute the output height automatically from the width by specifying the length as NaN.
outImageSize = [NaN 250];
Create a birdsEyeView object using the previously defined parameters, and transform the road image. Visualize the bird's-eye-view image.
birdsEye = birdsEyeView(sensor,outView,outImageSize); BEV = transformImage(birdsEye,Im); imshow(BEV)
![{"String":"Figure contains an axes object. The axes object contains an object of type image.","Tex":[],"LaTex":[]}](../../examples/driving/win64/ObtainCameraExtrinsicsBySpecifyingSceneGeomteryOnImageExample_02.png)
Input Arguments
Output Arguments
Pitch angle between the horizontal plane of the vehicle and the optical axis of the
camera, returned as a real scalar in degrees. pitch uses the ISO
convention for rotation, with a clockwise-positive angle direction when looking in the
positive direction of the vehicle's YV-axis.
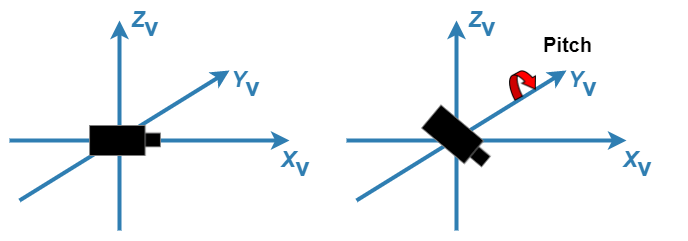
For more details, see Angle Directions.
Yaw angle between the XV-axis of the
vehicle and the optical axis of the camera, returned as a real scalar in degrees.
yaw uses the ISO convention for rotation, with a
clockwise-positive angle direction when looking in the positive direction of the
vehicle's ZV-axis.
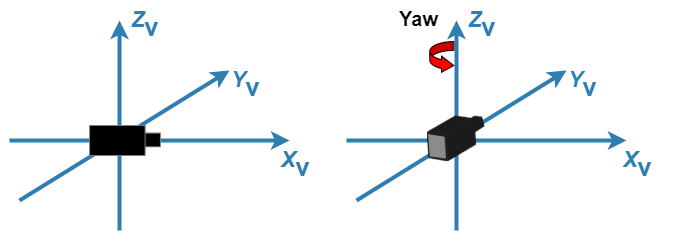
For more details, see Angle Directions.
Roll angle of the camera around its optical axis, returned as a real scalar in
degrees. roll uses the ISO convention for rotation, with a
clockwise-positive angle direction when looking in the positive direction of the
vehicle's XV-axis.

For more details, see Angle Directions.
Perpendicular height from the ground to the focal point of the camera, returned as a nonnegative real scalar in meters.
Intrinsic camera parameters, returned as a cameraIntrinsics object.
Limitations
The
cameraIntrinsicsobject returned has the same estimated focal length values in x and y.The function does not estimate skew, radial distortion, and tangential distortion. These values are
0in the returnedcameraIntrinsicsobject.
Version History
Introduced in R2022b