Sensor Models
Model various sensors, including: IMU (accelerometer, gyroscope, magnetometer), GPS receivers, altimeters, radar, lidar, sonar, and IR. You can mimic environmental, channel, and sensor configurations by modifying parameters of the sensor models. For active sensors, you can also model the corresponding emitters and channels as separate objects.
Functions
Blocks
| Fusion Radar Sensor | Generate radar sensor detections and tracks (Since R2022b) |
| GPS | Simulate GPS sensor readings with noise (Since R2021b) |
| IMU | IMU simulation model |
| INS | Simulate INS sensor |
Topics
- Introduction to Statistical Radar Models for Object Tracking
In a tracking system, sensors are used to generate measurements or detections from targets in an environment.
- Simulate Radar Detections
Simulate target detections by radar sensors.
- Model IMU, GPS, and INS/GPS
Model combinations of inertial sensors and GPS.
- Introduction to Simulating IMU Measurements
This example shows how to simulate inertial measurement unit (IMU) measurements using the
imuSensorSystem object™. - Remove Bias from Angular Velocity Measurement
This example shows how to remove gyroscope bias from an IMU using
imufilter.
Featured Examples
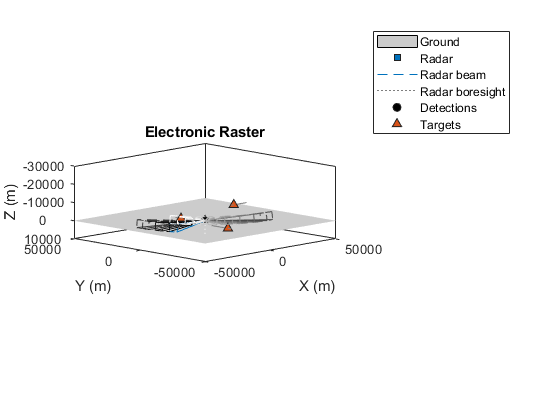
Scanning Radar Mode Configuration
Model different radar scan modes using the fusionRadarSensor. This example shows how to configure the fusionRadarSensor for several commonly used radar scan modes. With this model, you can simulate radars which mechanically scan, electronically scan, and which use both mechanical and electronic scanning. The scan limits in azimuth and elevation are configurable for both mechanical and electronic scan modes.
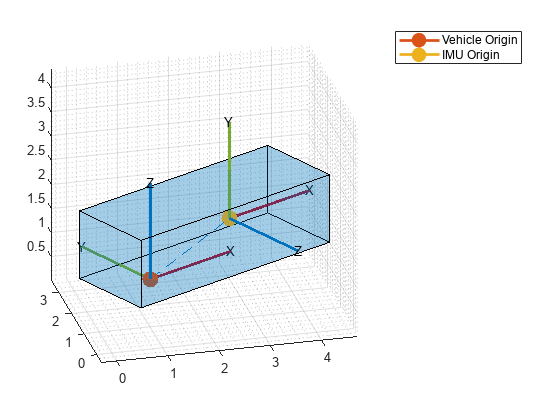
Generate Off-Centered IMU Readings
Generate inertial measurement unit (IMU) readings from a sensor that is mounted on a ground vehicle. Depending on the location of the sensor, the IMU accelerations are different.

Generate IMU Readings on a Double Pendulum
Generate inertial measurement unit (IMU) readings from two IMU sensors mounted on the links of a double pendulum. The double pendulum is modeled using Simscape™ Multibody™. For a step-by-step example of building a simple pendulum using Simscape Multibody, see Model a Simple Pendulum.