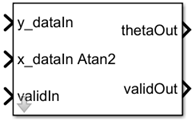
Atan2
使用 CORDIC 逼近方法计算 Atan2 运算并带延迟进行仿真
库:
HDL Coder
描述
Atan2 模块通过使用坐标旋转数字计算 (CORDIC) 逼近方法执行实数值输入信号的四象限反正切。有关详细信息,请参阅算法中的 CORDIC 逼近方法。该模块具有指示输入和输出数据是否有效的控制信号。您也可以指定算法的迭代次数和延迟策略。
要在您的 Simulink® 模型中使用此模块,请在 MATLAB® 命令行窗口中输入以下命令来打开 HDLMathLib 库:
open_system("HDLMathLib")您可以带延迟对 Atan2 模块进行仿真。有关详细信息,请参阅 延迟注意事项。
示例
Implement Atan2 Block with Control Signals
Implement the control-signal based Atan2 block and use it to generate HDL code.
端口
输入
输出
参数
算法
参考
[1] Volder, Jack E., “The CORDIC Trigonometric Computing Technique.” IRE Transactions on Electronic Computers EC-8 (1959); 330–334.
[2] Andraka, Ray “A Survey of CORDIC Algorithm for FPGA Based Computers.” Proceedings of the 1998 ACM/SIGDA Sixth International Symposium on Field Programmable Gate Arrays. Feb. 22–24 (1998): 191–200.
[3] Walther, J.S., “A Unified Algorithm for Elementary Functions,” Proceedings of the Spring Joint Computer Conference, May 18-20, 1971: 379–386.
[4] Schelin, Charles W., “Calculator Function Approximation,” The American Mathematical Monthly 90, no. 5 (1983): 317–325.