compreal
说明
csys = compreal(sys,type)sys depending on type. Specify type as "c" for controllable companion form or "o" for observable companion form.
"c"— Computes the controllable companion realization for a single-input LTI modelsys. This is the same as the first syntax."o"— Computes the observable companion realization for a single-output LTI modelsys.
示例
aircraftPitchSSModel.mat contains the state-space matrices of an aircraft where the input is elevator deflection angle and the output is the aircraft pitch angle .
Load the model data to the workspace and create the state-space model sys.
load('aircraftPitchSSModel.mat');
sys = ss(A,B,C,D)sys =
A =
x1 x2 x3
x1 -0.313 56.7 0
x2 -0.0139 -0.426 0
x3 0 56.7 0
B =
u1
x1 0.232
x2 0.0203
x3 0
C =
x1 x2 x3
y1 0 0 1
D =
u1
y1 0
Continuous-time state-space model.
Model Properties
Convert the resultant state-space model sys to controllable companion form.
csys = compreal(sys)
csys =
A =
x1 x2 x3
x1 0 0 1.914e-15
x2 1 0 -0.9215
x3 0 1 -0.739
B =
u1
x1 1
x2 0
x3 0
C =
x1 x2 x3
y1 0 1.151 -0.6732
D =
u1
y1 0
Continuous-time state-space model.
Model Properties
csys is the controllable companion form of sys.
The file icEngine.mat contains one data set with 1500 input-output samples collected at a sampling rate of 0.04 seconds. The input u(t) is the voltage (V) controlling the By-Pass Idle Air Valve (BPAV), and the output y(t) is the engine speed (RPM/100).
Use the data in icEngine.mat to create a state-space model with identifiable parameters.
load icEngine.mat z = iddata(y,u,0.04); sys = n4sid(z,4,'InputDelay',2);
Convert the identified state-space model sys to observable companion form.
[osys,T] = compreal(sys,"o");Compare frequency response confidence bounds of sys to osys.
bp = bodeplot(sys,osys,'r.');
showConfidence(bp)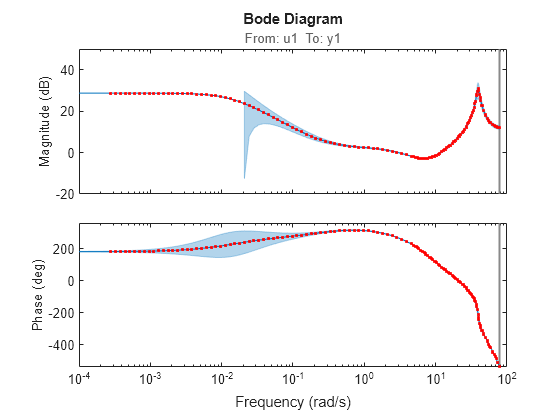
The frequency response confidence bounds are identical.
Additionally, compreal returns a transformation matrix T such that the observable companion form is , , .
输入参数
Output Arguments
提示
Computing companion realizations often involves ill-conditioned transformations and loss of accuracy. Use modalreal or balreal as numerically stable alternatives.
版本历史记录
在 R2023b 中推出