fieldPoint
Description
Add-On Required: This feature requires the Optical Design and Simulation Library for Image Processing Toolbox add-on.
Light Source at Infinity
fa = fieldPoint
Light Source at Finite Position
fp = fieldPoint(Name=Value)Position=[1 0 1] specifies the position of the light source as
[1 0 1] in the global coordinate system.
Examples
Create field points representing a light source in the yz-plane at 15 degrees below the optical axis, located at an infinite distance away from the first component in the optical system.
fa = fieldPoint(Angles=[15 0]);
Load a wide angle lens from a ZMX file into the workspace.
opsys = zmximport("WideAngleLens.zmx");Trace rays through the optical system using the traceRays object function. Add the field point representing your light source to the optical system by specifying the FieldPoint name-value argument.
rays = traceRays(opsys,Wavelengths=optics.constant.Fraunhofer.d,FieldPoints=fa);
Display a 2-D visualization of the optical system using the view2d object function. Visualize the traced rays on the displayed optical system using the addRays object function.
hv = view2d(opsys);
hv.Title = "Wide Angle Lens System";
addRays(hv,rays)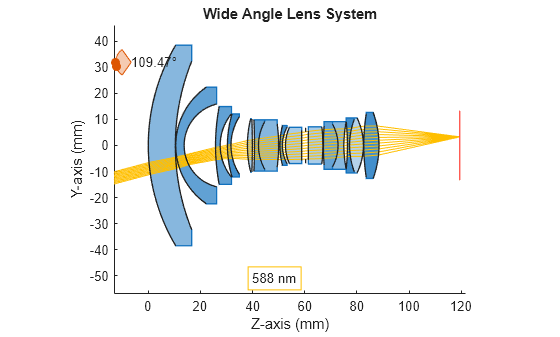
Load a wide angle lens from a ZMX file into the workspace.
opsys = zmximport("WideAngleLens.zmx");Specify the position of the first light source located at an infinite distance in the *yz-*plane at 20 degrees above the optical axis using the fieldPoint function.
fp1 = fieldPoint(Angles=[-20 0]);
Specify the position of the second light source in the global coordinate system, located at a finite distance from the first surface, using the Position name-value argument.
fp2 = fieldPoint(Position=[0 50 0],ReferenceFrame="Global");Combine the two light source representations into an array of field points.
fp = [fp1; fp2];
Trace rays through the optical system using the traceRays object function. Specify the FieldPoint name-value argument as the field point array.
rays = traceRays(opsys,Wavelengths=optics.constant.Fraunhofer.d,FieldPoints=fp);
Display a 2-D visualization of the optical system using the view2d object function. Visualize the traced rays on the displayed optical system using the addRays object function.
hv = view2d(opsys);
hv.Title = "Wide Angle Lens System";
addRays(hv,rays)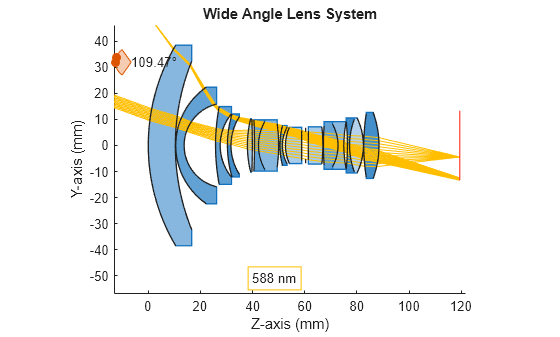
Input Arguments
Name-Value Arguments
Output Arguments
Version History
Introduced in R2026a