gmres
求解线性系统 - 广义最小残差法
语法
说明
示例
使用采用默认设置的 gmres 求解系数矩阵为方阵的线性系统,然后在求解过程中调整使用的容差和迭代次数。
创建一个随机稀疏矩阵 A,其密度为 50%,主对角线上的元素不为零。另为 的右侧创建随机向量 b。
rng default
A = sprandn(400,400,0.5) + 12*speye(400);
b = rand(400,1);使用 gmres 求解 。输出显示包括相对残差 的值。
x = gmres(A,b);
gmres stopped at iteration 10 without converging to the desired tolerance 1e-06 because the maximum number of iterations was reached. The iterate returned (number 10) has relative residual 0.35.
默认情况下,gmres 使用 10 次迭代和容差 1e-6,对于此矩阵,算法无法在 10 次迭代后收敛。由于残差仍然很大,这说明需要更多的迭代(或预条件子矩阵)。您也可以使用更大的容差,使算法更容易收敛。
使用容差 1e-4 和 100 次迭代再次求解方程组。
tol = 1e-4; maxit = 100; x = gmres(A,b,[],tol,maxit);
gmres stopped at iteration 100 without converging to the desired tolerance 0.0001 because the maximum number of iterations was reached. The iterate returned (number 100) has relative residual 0.0045.
即使采用更宽松的容差和更多迭代,残差的改进也不足以收敛。当迭代算法以这种方式停滞时,显然需要预条件子矩阵。不过,gmres 也有控制内迭代次数的输入。通过为内迭代指定值,gmres 将针对每次外迭代做更多的工作。
使用 restart 值 100 和 maxit 值 20 再次求解方程组。gmres 不是一次执行 100 次迭代,而是在两次重启之间执行 100 次迭代,并重复 20 次。
restart = 100; maxit = 20; x = gmres(A,b,restart,tol,maxit);
gmres(100) converged at outer iteration 2 (inner iteration 75) to a solution with relative residual 9.3e-05.
在这种情况下,为 gmres 指定较大的重启值会使其能够在允许的迭代次数内收敛于某个解。但是,当 A 也很大时,大的重启值会消耗大量内存。
检查使用预条件子矩阵和非重启 gmres 求解线性系统的效果。
加载 west0479,它是一个非对称的 479×479 实稀疏矩阵。
load west0479
A = west0479;定义 b 以使 的实际解是全为 1 的向量。
b = sum(A,2);
设置容差和最大迭代次数。
tol = 1e-12; maxit = 20;
使用 gmres 根据请求的容差和迭代次数求解。指定五个输出以返回有关求解过程的信息:
x是计算A*x = b所得的解。fl0是指示算法是否收敛的标志。rr0是计算的解x的相对残差。it0是二元素向量[outer inner],它表示计算x时的内迭代序号和外迭代序号。rv0是 的残差历史记录组成的向量。
[x,fl0,rr0,it0,rv0] = gmres(A,b,[],tol,maxit); fl0
fl0 = 1
rr0
rr0 = 0.7603
it0
it0 = 1×2
1 20
gmres 未在请求的 20 次迭代内收敛至请求的容差 1e-12,因此 fl0 为 1。gmres 返回的最佳近似解是最后一个(如 it0(2) = 20 所示)。MATLAB® 将残差历史记录存储于 rv0 中。
为了有助于缓慢收敛,您可以指定预条件子矩阵。由于 A 是非对称的,请使用 ilu 生成预条件子 。指定调降容差,以忽略值小于 1e-6 的非对角线元。通过指定 L 和 U 作为 gmres 的输入,求解预条件方程组 。请注意,当您指定预条件子时,gmres 会针对输出 rr1 和 rv1 计算预条件方程组的残差范数。
[L,U] = ilu(A,struct('type','ilutp','droptol',1e-6)); [x1,fl1,rr1,it1,rv1] = gmres(A,b,[],tol,maxit,L,U); fl1
fl1 = 0
rr1
rr1 = 1.0711e-13
it1
it1 = 1×2
1 6
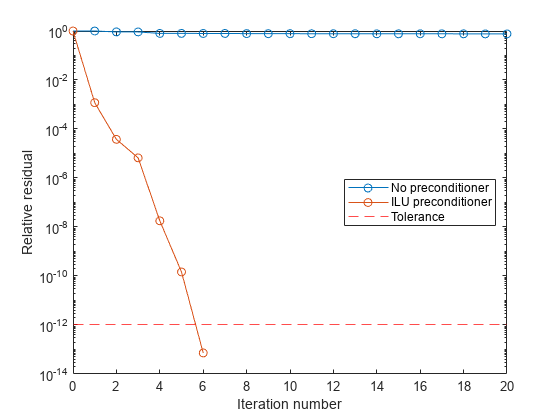
在第六次迭代中,使用 ilu 预条件子产生的相对残差小于规定的容差 1e-12。第一个残差 rv1(1) 是 norm(U\(L\b)),其中 M = L*U。最后一个残差 rv1(end) 是 norm(U\(L\(b-A*x1)))。
您可以通过绘制每次迭代的相对残差来跟踪 gmres 的进度。绘制每个解的残差历史记录图,并添加一条表示指定容差的线。
semilogy(0:length(rv0)-1,rv0/norm(b),'-o') hold on semilogy(0:length(rv1)-1,rv1/norm(U\(L\b)),'-o') yline(tol,'r--'); legend('No preconditioner','ILU preconditioner','Tolerance','Location','East') xlabel('Iteration number') ylabel('Relative residual')
使用指定了预条件子的重启的 gmres。
加载 west0479,它是一个非对称的 479×479 实稀疏矩阵。
load west0479
A = west0479;定义 b 以使 的实际解是全为 1 的向量。
b = sum(A,2);
构造一个调降容差为 1e-6 的不完全 LU 预条件子。
[L,U] = ilu(A,struct('type','ilutp','droptol',1e-6));
使用重新启动的 gmres 的好处是限制执行该方法所需的内存量。如果不重新启动,gmres 需要存储 maxit 向量来保存基本克雷洛夫子空间。此外,gmres 必须在每一步与以前的所有向量正交。重新启动可限制使用的工作区量以及每次外迭代执行的工作量。
使用不完全 LU 因子作为预条件子执行 gmres(3)、gmres(4) 和 gmres(5)。使用容差 1e-12 和最多 20 次外迭代。
tol = 1e-12; maxit = 20; [x3,fl3,rr3,it3,rv3] = gmres(A,b,3,tol,maxit,L,U); [x4,fl4,rr4,it4,rv4] = gmres(A,b,4,tol,maxit,L,U); [x5,fl5,rr5,it5,rv5] = gmres(A,b,5,tol,maxit,L,U); fl3
fl3 = 0
fl4
fl4 = 0
fl5
fl5 = 0
fl3、fl4 和 fl5 均为 0,因为在每种情况下重新启动的 gmres 使相对残差趋向小于 1e-12 的规定容差。
以下绘图显示了每个重启的 gmres 方法的收敛历史记录。gmres(3) 收敛于外迭代 5、内迭代 3 (it3 = [5, 3]),这将与外迭代 6、内迭代 0 相同,因此最终刻度线上的标记是 6。
semilogy(1:1/3:6,rv3/norm(U\(L\b)),'-o'); h1 = gca; h1.XTick = (1:6); title('gmres(N) for N = 3, 4, 5') xlabel('Outer iteration number'); ylabel('Relative residual'); hold on semilogy(1:1/4:3,rv4/norm(U\(L\b)),'-o'); semilogy(1:1/5:2.8,rv5/norm(U\(L\b)),'-o'); yline(tol,'r--'); hold off legend('gmres(3)','gmres(4)','gmres(5)','Tolerance') grid on
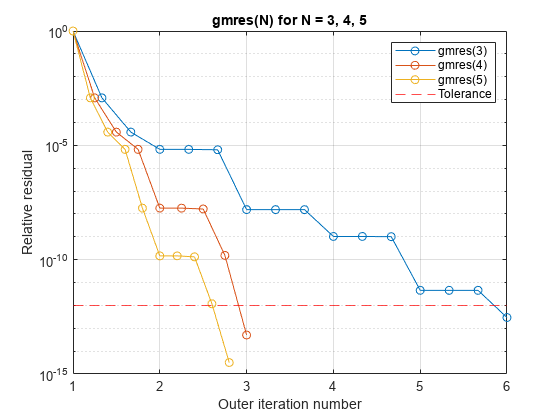
一般情况下,内迭代次数越多,gmres 针对每个外迭代所做的工作会越多,收敛速度也会越快。
检查向 gmres 提供解的初始估计值的效果。
创建一个三对角稀疏矩阵。使用每行的总和作为 右侧的向量,使 的预期解是由 1 组成的向量。
n = 900; e = ones(n,1); A = spdiags([e 2*e e],-1:1,n,n); b = sum(A,2);
使用 gmres 求解 两次:一次是使用默认的初始估计值,一次是使用解的良好初始估计值。对两次求解均使用 200 次迭代和默认容差。将第二种求解中的初始估计值指定为所有元素都等于 0.99 的向量。
maxit = 200; x1 = gmres(A,b,[],[],maxit);
gmres converged at iteration 27 to a solution with relative residual 9.5e-07.
x0 = 0.99*e; x2 = gmres(A,b,[],[],maxit,[],[],x0);
gmres converged at iteration 7 to a solution with relative residual 6.7e-07.
在这种情况下,提供初始估计值可以使 gmres 更快地收敛。
返回中间结果
您还可以通过在 for 循环中调用 gmres 来使用初始估计值获得中间结果。每次调用求解器都会执行几次迭代,并存储计算出的解。然后,将该解用作下一批迭代的初始向量。
例如,以下代码会循环执行四次,每次执行 100 次迭代,并在 for 循环中每通过一次后均存储解向量:
x0 = zeros(size(A,2),1); tol = 1e-8; maxit = 100; for k = 1:4 [x,flag,relres] = gmres(A,b,[],tol,maxit,[],[],x0); X(:,k) = x; R(k) = relres; x0 = x; end
X(:,k) 是在 for 循环的第 k 次迭代时计算的解向量,R(k) 是该解的相对残差。
通过为 gmres 提供用来计算 A*x 的函数句柄(而非系数矩阵 A)来求解线性系统。
gallery 生成的威尔金森测试矩阵之一是 21×21 三对角矩阵。预览该矩阵。
A = gallery('wilk',21)A = 21×21
10 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
1 9 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 1 8 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 1 7 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 1 6 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 1 5 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 1 4 1 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 1 3 1 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 1 2 1 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 1 0 1 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 1 2 1 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 1 3 1 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 1 4 1 0 0 0 0 0
⋮
威尔金森矩阵有特殊的结构,因此您可以用函数句柄来表示 A*x 运算。当 A 乘以向量时,所得向量中的大多数元素为零。结果中的非零元素对应于 A 的非零三对角元素。此外,只有主对角线具有不等于 1 的非零值。
表达式 变为:
.
结果向量可以写为三个向量的和:
=.
在 MATLAB® 中,编写一个函数来创建这些向量并将它们相加,从而给出 A*x 的值:
function y = afun(x) y = [0; x(1:20)] + ... [(10:-1:0)'; (1:10)'].*x + ... [x(2:21); 0]; end
(该函数作为局部函数保存在示例的末尾。)
现在,通过为 gmres 提供用于计算 A*x 的函数句柄,求解线性系统 。重启前,使用容差 1e-12、15 次外迭代和 10 次内迭代。
b = ones(21,1); tol = 1e-12; maxit = 15; restart = 10; x1 = gmres(@afun,b,restart,tol,maxit)
gmres(10) converged at outer iteration 5 (inner iteration 10) to a solution with relative residual 5.3e-13.
x1 = 21×1
0.0910
0.0899
0.0999
0.1109
0.1241
0.1443
0.1544
0.2383
0.1309
0.5000
0.3691
0.5000
0.1309
0.2383
0.1544
⋮
检查 afun(x1) 是否产生由 1 组成的向量。
afun(x1)
ans = 21×1
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
⋮
局部函数
function y = afun(x) y = [0; x(1:20)] + ... [(10:-1:0)'; (1:10)'].*x + ... [x(2:21); 0]; end
输入参数
输出参量
详细信息


提示
大多数迭代方法的收敛取决于系数矩阵的条件数
cond(A)。当A是方阵时,您可以使用equilibrate来改进其条件数,它本身就能使大多数迭代求解器更容易收敛。但如果您随后会对经平衡处理的矩阵B = R*P*A*C进行因式分解,使用equilibrate还可以获得质量更好的预条件子矩阵。您可以使用矩阵重新排序函数(如
dissect和symrcm)来置换系数矩阵的行和列,并在系数矩阵被分解以生成预条件子时最小化非零值的数量。这可以减少后续求解预条件线性系统所需的内存和时间。
参考
[1] Barrett, R., M. Berry, T. F. Chan, et al., Templates for the Solution of Linear Systems: Building Blocks for Iterative Methods, SIAM, Philadelphia, 1994.
[2] Saad, Yousef and Martin H. Schultz, “GMRES: A generalized minimal residual algorithm for solving nonsymmetric linear systems,” SIAM J. Sci. Stat. Comput., July 1986, Vol. 7, No. 3, pp. 856-869.