pcg
求解线性系统 - 预条件共轭梯度法
语法
说明
示例
使用采用默认设置的 pcg 求解系数矩阵为方阵的线性系统,然后在求解过程中调整使用的容差和迭代次数。
创建一个随机对称稀疏矩阵 A。还要为 的右侧创建一个由 b 的行总和组成的向量 A,使得实际解 是由 1 组成的向量。
rng default
A = sprand(400,400,.5);
A = A'*A;
b = sum(A,2);使用 pcg 求解 。输出显示包括相对残差 的值。
x = pcg(A,b);
pcg stopped at iteration 20 without converging to the desired tolerance 1e-06 because the maximum number of iterations was reached. The iterate returned (number 20) has relative residual 3.6e-06.
默认情况下,pcg 使用 20 次迭代和容差 1e-6,对于此矩阵,算法无法在 20 次迭代后收敛。然而,残差接近容差,因此算法可能只需更多迭代即可收敛。
使用容差 1e-7 和 150 次迭代再次求解方程组。
x = pcg(A,b,1e-7,150);
pcg converged at iteration 129 to a solution with relative residual 1e-07.
检查使用指定了预条件子矩阵的 pcg 来求解线性系统的效果。
创建一个对称正定带状系数矩阵。
A = delsq(numgrid('S',102));定义 b 作为线性方程 的右侧。
b = ones(size(A,1),1);
设置容差和最大迭代次数。
tol = 1e-8; maxit = 100;
使用 pcg 根据请求的容差和迭代次数求解。指定五个输出以返回有关求解过程的信息:
x是计算A*x = b所得的解。fl0是指示算法是否收敛的标志。rr0是计算的解x的相对残差。it0是计算x时所用的迭代序号。rv0是 的残差历史记录组成的向量。
[x,fl0,rr0,it0,rv0] = pcg(A,b,tol,maxit); fl0
fl0 = 1
rr0
rr0 = 0.0131
it0
it0 = 100
由于 pcg 未在请求的 100 次迭代内收敛至请求的容差 1e-8,因此 fl0 为 1。
为了有助于缓慢收敛,您可以指定预条件子矩阵。由于 A 是对称矩阵,请使用 ichol 生成预条件子 。通过指定 L 和 L' 作为 pcg 的输入,求解预条件方程组。
L = ichol(A); [x1,fl1,rr1,it1,rv1] = pcg(A,b,tol,maxit,L,L'); fl1
fl1 = 0
rr1
rr1 = 8.0992e-09
it1
it1 = 79
在第 79 次迭代中,使用 ichol 预条件子产生的相对残差小于规定的容差 1e-8。输出 rv1(1) 是 norm(b) 且 rv1(end) 是 norm(b-A*x1)。
现在,使用 michol 选项创建修正的不完全乔列斯基预条件子。
L = ichol(A,struct('michol','on')); [x2,fl2,rr2,it2,rv2] = pcg(A,b,tol,maxit,L,L'); fl2
fl2 = 0
rr2
rr2 = 9.9619e-09
it2
it2 = 47
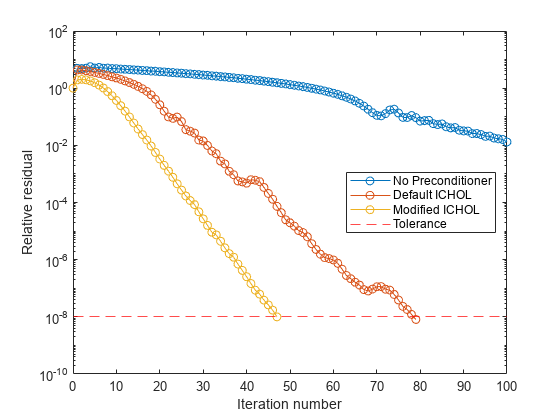
该预条件子优于使用零填充不完全乔列斯基分解为本例中的系数矩阵生成的预条件子,因此 pcg 能够更快地收敛。
通过绘制从初始估计值(迭代编号 0)开始的每次残差历史记录,可以查看预条件子如何影响 pcg 的收敛速度。为指定的容差添加一个线条。
semilogy(0:length(rv0)-1,rv0/norm(b),'-o') hold on semilogy(0:length(rv1)-1,rv1/norm(b),'-o') semilogy(0:length(rv2)-1,rv2/norm(b),'-o') yline(tol,'r--'); legend('No Preconditioner','Default ICHOL','Modified ICHOL','Tolerance','Location','East') xlabel('Iteration number') ylabel('Relative residual')
检查向 pcg 提供解的初始估计值的效果。
创建一个三对角稀疏矩阵。使用每行的总和作为 右侧的向量,使 的预期解是由 1 组成的向量。
n = 900; e = ones(n,1); A = spdiags([e 2*e e],-1:1,n,n); b = sum(A,2);
使用 pcg 求解 两次:一次是使用默认的初始估计值,一次是使用解的良好初始估计值。对两次求解均使用 200 次迭代和默认容差。将第二种求解中的初始估计值指定为所有元素都等于 0.99 的向量。
maxit = 200; x1 = pcg(A,b,[],maxit);
pcg converged at iteration 35 to a solution with relative residual 9.5e-07.
x0 = 0.99*e; x2 = pcg(A,b,[],maxit,[],[],x0);
pcg converged at iteration 7 to a solution with relative residual 8.7e-07.
在这种情况下,提供初始估计值可以使 pcg 更快地收敛。
返回中间结果
您还可以通过在 for 循环中调用 pcg 来使用初始估计值获得中间结果。每次调用求解器都会执行几次迭代,并存储计算出的解。然后,将该解用作下一批迭代的初始向量。
例如,以下代码会循环执行四次,每次执行 100 次迭代,并在 for 循环中每通过一次后均存储解向量:
x0 = zeros(size(A,2),1); tol = 1e-8; maxit = 100; for k = 1:4 [x,flag,relres] = pcg(A,b,tol,maxit,[],[],x0); X(:,k) = x; R(k) = relres; x0 = x; end
X(:,k) 是在 for 循环的第 k 次迭代时计算的解向量,R(k) 是该解的相对残差。
通过为 pcg 提供用来计算 A*x 的函数句柄(而非系数矩阵 A)来求解线性系统。
使用 gallery 生成一个 20×20 正定三对角矩阵。上对角线和下对角线上的元素都是 1,而主对角线元素是从 20 递减到 1。预览该矩阵。
n = 20;
A = gallery('tridiag',ones(n-1,1),n:-1:1,ones(n-1,1));
full(A)ans = 20×20
20 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
1 19 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 1 18 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 1 17 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 1 16 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 1 15 1 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 1 14 1 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 1 13 1 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 1 12 1 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 1 11 1 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 1 10 1 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 1 9 1 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 1 8 1 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 1 7 1 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 1 6 1 0 0 0 0
⋮
由于此三对角矩阵有特殊的结构,您可以用函数句柄来表示 A*x 运算。当 A 乘以向量时,所得向量中的大多数元素为零。结果中的非零元素对应于 A 的非零三对角元素。此外,只有主对角线具有不等于 1 的非零值。
表达式 变为:
.
结果向量可以写为三个向量的和:
=.
在 MATLAB® 中,编写一个函数来创建这些向量并将它们相加,从而给出 A*x 的值:
function y = afun(x) y = [0; x(1:19)] + ... [(20:-1:1)'].*x + ... [x(2:20); 0]; end
(该函数作为局部函数保存在示例的末尾。)
现在,通过为 pcg 提供用于计算 A*x 的函数句柄,求解线性系统 。使用容差 1e-12 和 50 次迭代。
b = ones(20,1); tol = 1e-12; maxit = 50; x1 = pcg(@afun,b,tol,maxit)
pcg converged at iteration 20 to a solution with relative residual 4.4e-16.
x1 = 20×1
0.0476
0.0475
0.0500
0.0526
0.0555
0.0588
0.0625
0.0666
0.0714
0.0769
0.0832
0.0908
0.0998
0.1112
0.1222
⋮
检查 afun(x1) 是否产生由 1 组成的向量。
afun(x1)
ans = 20×1
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
⋮
局部函数
function y = afun(x) y = [0; x(1:19)] + ... [(20:-1:1)'].*x + ... [x(2:20); 0]; end
输入参数
输出参量
详细信息
提示
大多数迭代方法的收敛取决于系数矩阵的条件数
cond(A)。当A是方阵时,您可以使用equilibrate来改进其条件数,它本身就能使大多数迭代求解器更容易收敛。但如果您随后会对经平衡处理的矩阵B = R*P*A*C进行因式分解,使用equilibrate还可以获得质量更好的预条件子矩阵。您可以使用矩阵重新排序函数(如
dissect和symrcm)来置换系数矩阵的行和列,并在系数矩阵被分解以生成预条件子时最小化非零值的数量。这可以减少后续求解预条件线性系统所需的内存和时间。
参考
[1] Barrett, R., M. Berry, T. F. Chan, et al., Templates for the Solution of Linear Systems: Building Blocks for Iterative Methods, SIAM, Philadelphia, 1994.