Inverse Kinematics
Inverse kinematics (IK) determine joint configurations of a robot model to achieve a desired
end-effect position. Robot kinematic constraints are specified in the rigidBodyTree robot model based on
the transformation between joints. You can use generalized inverse kinematics (GIK)
to solve for configurations that satisfy constraints, such as an aiming constraint
for a camera arm or a Cartesian bounding box on a certain rigid body link. Specify
parameters for these constraints with the GIK Robot
Constraints objects and pass them to a generalizedInverseKinematics
object.
For more information about inverse kinematics, see the What Is Inverse Kinematics? page.
Apps
| Inverse Kinematics Designer | Design inverse kinematics solvers, configurations, and waypoints (Since R2022a) |
Functions
Blocks
| Inverse Kinematics | Compute joint configurations to achieve an end-effector pose |
Topics
- Inverse Kinematics Algorithms
Description of inverse kinematics solver algorithms and solver parameters
- Inverse Kinematics for Robots with Floating Base
Calculate inverse kinematics for floating-base systems such as manipulators in space. (Since R2024a)
- Trajectory Control Modeling with Inverse Kinematics
Drive a manipulator along a specified trajectory using the Simulink® Inverse Kinematics block.
Related Information
Featured Examples
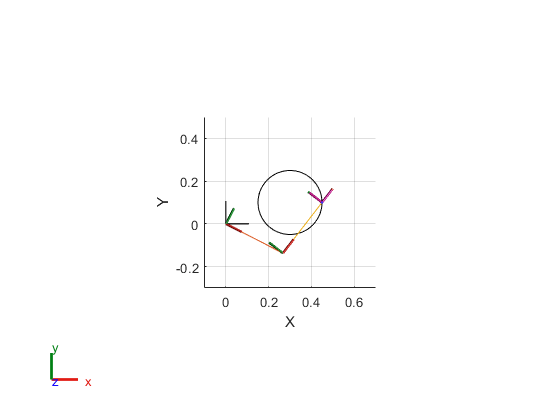
2-D Path Tracing with Inverse Kinematics
Calculate inverse kinematics for a simple 2-D manipulator.
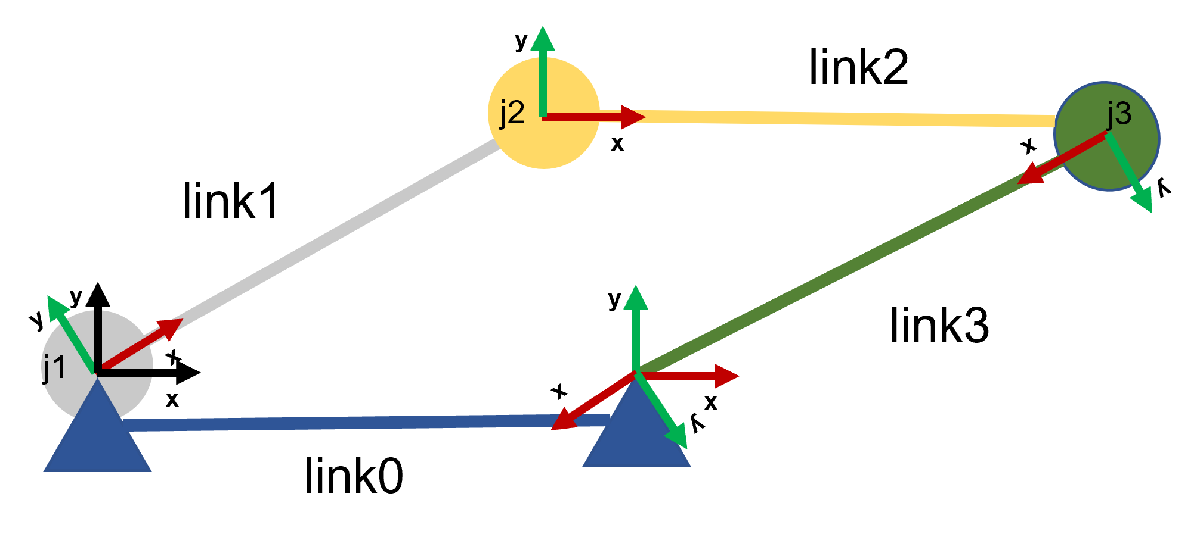
Solve Inverse Kinematics for Closed Loop Linkages
Model closed-loop linkages like four-bar systems using constraints with an inverse kinematics solver.
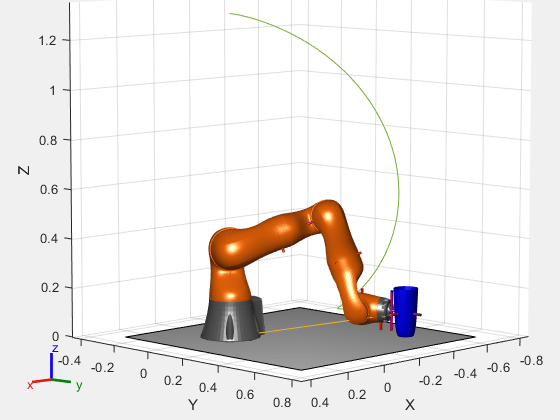
Plan a Reaching Trajectory with Multiple Kinematic Constraints
Plan a manipulator trajectory with constraints for a precise gripper approach using generalized inverse kinematics.

Plan Manipulator Path for Dispensing Task Using Inverse Kinematics Designer
Design a collision-free manipulator path for adhesive dispensing using Inverse Kinematics Designer app.