manipulatorRRT
Plan motion for rigid body tree using bidirectional RRT
Description
The manipulatorRRT object is a single-query planner for
manipulator arms that uses the bidirectional rapidly exploring random trees (RRT) algorithm
with an optional connect heuristic to potentially increase speed.
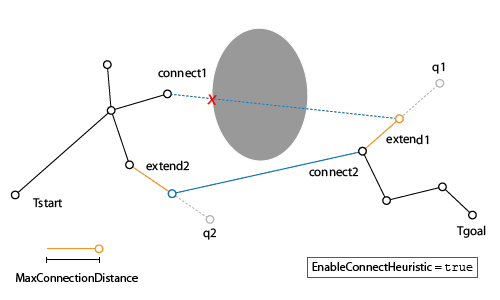
The bidirectional RRT planner creates two trees with root nodes at the specified start and goal configurations. To extend each tree, the planner generates a random configuration and, if valid, takes a step from the nearest node based on the MaxConnectionDistance property. After each extension, the planner attempts to connect between the two trees using the new extension and the closest node on the opposite tree. Invalid configurations or connections that collide with the environment are not added to the tree.
For a greedier search, enabling the EnableConnectHeuristic property disables the limit on the
MaxConnectionDistance property when connecting between the two
trees.
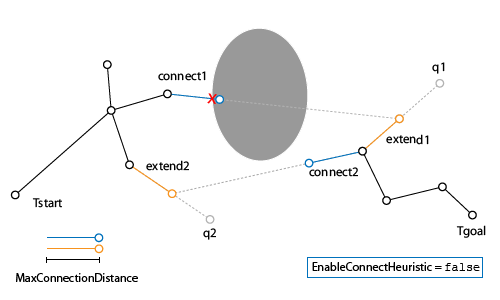
Setting the EnableConnectHueristic property to
false limits the extension distance when connecting between the two trees
to the value of the MaxConnectionDistance property.
The object uses a rigidBodyTree robot model to generate the
random configurations and intermediate states between nodes. Collision objects are specified
in the robot model to validate the configurations and check for collisions with the
environment or the robot itself.
To plan a path between a start and a goal configuration, use the plan object
function. After planning, you can interpolate states along the path using the interpolate
object function. To attempt to shorten the path by trimming edges, use the shorten object
function.
To specify a region to sample end-effector poses near the goal configuration, create a
workspaceGoalRegion object and specify it as the goalRegion
input to the plan object
function. To change the probability of sampling additional goal configurations, specify the
WorkspaceGoalRegionBias property.
For more information about the computational complexity, see Planning Complexity.
Creation
Syntax
Description
rrt = manipulatorRRT( creates
a bidirectional RRT planner for the specified robotRBT,{})rigidBodyTree robot model. The empty cell array indicates that there are no
obstacles in the environment.
rrt = manipulatorRRT(
creates a planner for a robot model with collision objects placed in the environment.
The planner checks for collisions with these objects.robotRBT,collisionObjects)
rrt = manipulatorRRT(___,Map=
specifies a 3-D occupancy map map)map to represent the environment.
This requires Navigation Toolbox™.
rrt = manipulatorRRT(___,
specifies properties using one or more name-value arguments in addition to any input
arguments from the previous syntaxes.Name=Value)
Input Arguments
Properties
Object Functions
plan | Plan path using RRT for manipulators |
interpolate | Interpolate states along path from RRT |
shorten | Trim edges to shorten path from RRT |
Examples
Use the manipulatorRRT object to plan a path for a rigid body tree robot model in an environment with obstacles. Visualize the planned path with interpolated states.
Load a robot model into the workspace. Use the KUKA LBR iiwa© manipulator arm.
robot = loadrobot("kukaIiwa14","DataFormat","row");
Generate the environment for the robot. Create collision objects and specify their poses relative to the robot base. Visualize the environment.
env = {collisionBox(0.5, 0.5, 0.05) collisionSphere(0.3)};
env{1}.Pose(3, end) = -0.05;
env{2}.Pose(1:3, end) = [0.1 0.2 0.8];
show(robot);
hold on
show(env{1})
show(env{2})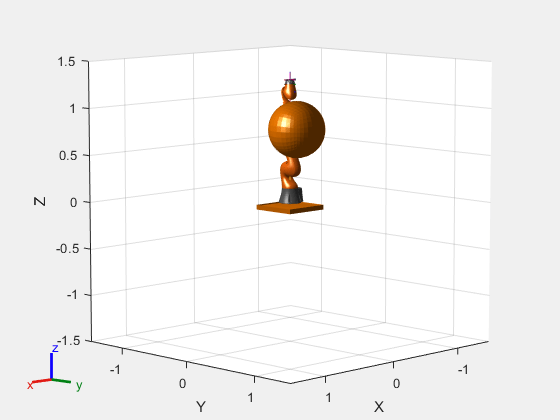
Create the RRT planner for the robot model.
rrt = manipulatorRRT(robot,env);
rrt.SkippedSelfCollisions = "parent";Specify a start and a goal configuration.
startConfig = [0.08 -0.65 0.05 0.02 0.04 0.49 0.04]; goalConfig = [2.97 -1.05 0.05 0.02 0.04 0.49 0.04];
Plan the path. Due to the randomness of the RRT algorithm, set the rng seed for repeatability.
rng(0) path = plan(rrt,startConfig,goalConfig);
Visualize the path. To add more intermediate states, interpolate the path. By default, the interpolate object function uses the value of ValidationDistance property to determine the number of intermediate states. The for loop shows every 20th element of the interpolated path.
interpPath = interpolate(rrt,path); clf for i = 1:20:size(interpPath,1) show(robot,interpPath(i,:)); hold on end show(env{1}) show(env{2}) hold off
Specify a goal region in your workspace and plan a path within those bounds. The workspaceGoalRegion object defines the bounds on the xyz-position and zyx Euler orientation of the robot end effector. The manipulatorRRT object plans a path based on that goal region and samples random poses within the bounds.
Load an existing robot model as a rigidBodyTree object.
robot = loadrobot("kinovaGen3", "DataFormat", "row"); ax = show(robot);
Create Path Planner
Create a rapidly-exploring random tree (RRT) path planner for the robot. This example uses an empty environment, but this workflow also works well with cluttered environments. You can add collision objects to the environment like the collisionBox or collisionMesh object.
planner = manipulatorRRT(robot,{});
planner.SkippedSelfCollisions="parent";Define Goal Region
Create a workspace goal region using the end-effector body name of the robot.
Define the goal region parameters for your workspace. The goal region includes a reference pose, xyz-position bounds, and orientation limits on the zyx Euler angles. This example specifies bounds on the xy-plane in meters and allows rotation about the z-axis in radians.
goalRegion = workspaceGoalRegion(robot.BodyNames{end});
goalRegion.ReferencePose = trvec2tform([0.5 0.5 0.2]);
goalRegion.Bounds(1, :) = [-0.2 0.2]; % X Bounds
goalRegion.Bounds(2, :) = [-0.2 0.2]; % Y Bounds
goalRegion.Bounds(4, :) = [-pi/2 pi/2]; % Rotation about the Z-axisYou can also apply a fixed offset to all poses sampled within the region. This offset can account for grasping tools or variations in dimensions within your workspace. For this example, apply a fixed transformation that places the end effector 5 cm above the workspace.
goalRegion.EndEffectorOffsetPose = trvec2tform([0 0 0.05]);
hold on
show(goalRegion);
Plan Path To Goal Region
Plan a path to the goal region from the robot's home configuration. Due to the randomness in the RRT algorithm, this example sets the rng seed to ensure repeatable results.
rng(0) path = plan(planner,homeConfiguration(robot),goalRegion);
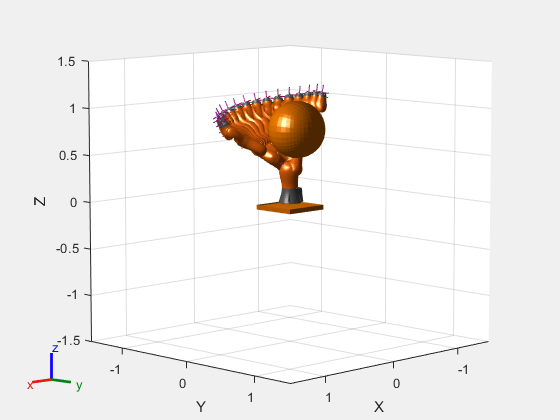
Show the robot executing the path. To visualize a more realistic path, interpolate points between path configurations.
interpConfigurations = interpolate(planner,path,5); for i = 1:size(interpConfigurations,1) show(robot,interpConfigurations(i,:),"PreservePlot",false); set(ax,'ZLim',[-0.05 0.75],'YLim',[-0.05 1],'XLim',[-0.05 1],... 'CameraViewAngle',5) drawnow end hold off
Adjust End-Effector Pose
Notice that the robot arm approaches the workspace from the bottom. To flip the orientation of the final position, add a pi rotation to the Y-axis for the reference pose.
goalRegion.EndEffectorOffsetPose = ... goalRegion.EndEffectorOffsetPose*eul2tform([0 pi 0],"ZYX");
Replan the path and visualize the robot motion again. The robot now approaches from the top.
hold on show(goalRegion); path = plan(planner,homeConfiguration(robot),goalRegion); interpConfigurations = interpolate(planner,path,5); for i = 1 : size(interpConfigurations,1) show(robot, interpConfigurations(i, :),"PreservePlot",false); set(ax,'ZLim',[-0.05 0.75],'YLim',[-0.05 1],'XLim',[-0.05 1]) drawnow; end hold off

Load the Kinova Gen 3 robot.
rbt = loadrobot("kinovagen3",DataFormat="row");
Create a 3-D occupancy map and set the coordinate at [0.4 0.0 0.4] to occupied.
map = occupancyMap3D(10); map.setOccupancy([0.4 0.0 0.4],1);
Display the robot in the map.
show(map); hold on show(rbt); axis("equal") xlim([-1,1.0]) ylim([-1,1.0]) zlim([-0.5,1.2])
Define a start configuration.
startconfig = [2.2131,-1.3950,0.1618,0.2053,-0.1624,1.1684,-2.1886];
Define a goal configuration that is the same as the start configuration except for the first joint.
goalconfig = startconfig; goalconfig(1) = 3.4;
Create the manipulator RRT planner for the robot and specify the map as the environment using the Map argument.
planner = manipulatorRRT(rbt,{},Map=map);
planner.ValidationDistance=0.1;
planner.MaxConnectionDistance=0.2;
planner.SkippedSelfCollisions="parent";Plan a path between the start and goal configuration. Then interpolate between the paths.
plannedpath = plan(planner,startconfig,goalconfig); interpoalatedpath = interpolate(planner,plannedpath);
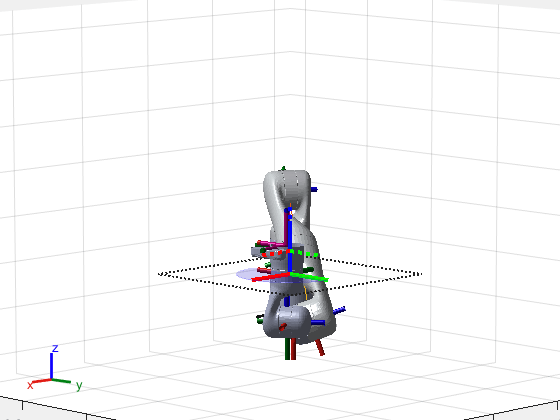
Animate the robot following the path.
rc=rateControl(10); view([pi/3,pi/2,pi/4]); for i = 1:size(interpoalatedpath,1) show(rbt,interpoalatedpath(i,:),FastUpdate=true,PreservePlot=false); waitfor(rc); end
![Figure contains an axes object. The axes object with title Occupancy Map, xlabel X [meters], ylabel Y [meters] contains 26 objects of type patch, line.](../../examples/robotics/win64/PlanPathThrough3DOccupancyMapExample_01.png)
Tips
Planning Complexity
When planning the motion between nodes in the tree, a set of configurations are generated and validated. This computation time of the planner is proportional to the number of configurations generated. The number of configurations between nodes is controlled by the ratio of the MaxConnectionDistance and ValidationDistance properties. To improve planning time, consider increasing the validation distance or decreasing the max connection distance.
Validating each configuration has a complexity of O(mn+m2), where m is the number of collision bodies in the
rigidBodyTreeobject and n is the number of collision objects inworldObjects. Using large numbers of meshes to represent your robot or environment increases the time for validating each configuration.
Infinite Joint Limits
If your
rigidBodyTreerobot model has joint limits that have infinite range (e.g. revolute joint with limits of[-Inf Inf]), themanipulatorRRTobject uses limits of[-1e10 1e10]to perform uniform random sampling in the joint limits.
References
[1] Kuffner, J. J., and S. M. LaValle. “RRT-Connect: An Efficient Approach to Single-Query Path Planning.” In Proceedings 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation. Symposia Proceedings (Cat. No.00CH37065), 2:995–1001. San Francisco, CA, USA: IEEE, 2000. https://doi:10.1109/ROBOT.2000.844730.