estimateWorldCameraPose
(Not recommended) Estimate camera pose from 3-D to 2-D point correspondences
estimateWorldCameraPose is not recommended. Use the estworldpose
function instead. For more information, see Version History.
Syntax
Description
[
returns the orientation and location of a calibrated camera in a world coordinate system.
The input worldOrientation,worldLocation]
= estimateWorldCameraPose(imagePoints,worldPoints,cameraParams)worldPoints must be defined in the world coordinate
system.
This function solves the perspective-n-point (PnP) problem using the perspective-three-point (P3P) algorithm [1]. The function eliminates spurious outlier correspondences using the M-estimator sample consensus (MSAC) algorithm. The inliers are the correspondences between image points and world points that are used to compute the camera pose.
[___,
returns the indices of the inliers used to compute the camera pose, in addition to the
arguments from the previous syntax.inlierIdx] =
estimateWorldCameraPose(imagePoints,worldPoints,cameraParams)
[___,
additionally returns a status code to indicate whether there were enough points.status] = estimateWorldCameraPose(imagePoints,worldPoints,cameraParams)
[___] = estimateWorldCameraPose(___,
uses additional options specified by one or more Name,Value)Name,Value pair
arguments, using any of the preceding syntaxes.
Examples
Load previously calculated world-to-image correspondences.
data = load('worldToImageCorrespondences.mat');Estimate the world camera pose.
[worldOrientation,worldLocation] = estimateWorldCameraPose(...
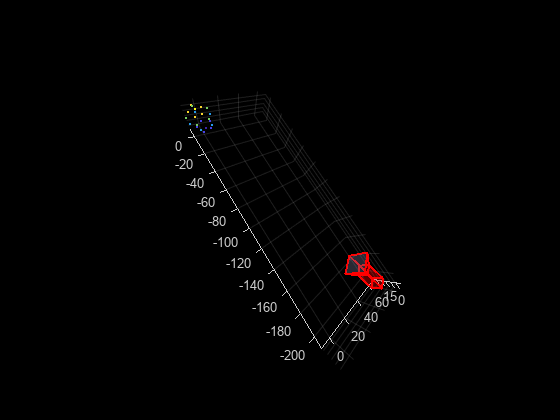
data.imagePoints,data.worldPoints,data.cameraParams);Plot the world points.
pcshow(data.worldPoints,'VerticalAxis','Y','VerticalAxisDir','down', ... 'MarkerSize',30); hold on plotCamera('Size',10,'Orientation',worldOrientation,'Location',... worldLocation); hold off
Input Arguments
Name-Value Arguments
Output Arguments
References
[1] Gao, X.-S., X.-R. Hou, J. Tang, and H.F. Cheng. "Complete Solution Classification for the Perspective-Three-Point Problem." IEEE Transactions on Pattern Analysis and Machine Intelligence. Volume 25,Issue 8, pp. 930–943, August 2003.
[2]