ORBPoints
Object for storing ORB keypoints
Description
An ORBPoints object stores the Oriented FAST and rotated BRIEF
(ORB) keypoints in an image. You can specify the keypoints and store them as an
ORBPoints object. You can also use the detectORBFeatures
function to detect the ORB keypoints in an image. The detectORBFeatures
function stores the detected ORB keypoints as an ORBPoints object. Use
Object Functions to plot, select, and manipulate the
detected ORB keypoints.
Creation
Description
points = ORBPointsORBPoints object with default property values.
points = ORBPoints(location)ORBPoints object from a set of location coordinates
specified by location. The location input sets the
Location property.
points = ORBPoints(location,Name,Value)ORBPoints(location,'Count',15)
creates an ORBPoints object with Count property
set to 15.
Properties
Object Functions
isempty | Determine if points object is empty |
length | Number of stored points |
plot | Plot detected feature points |
selectStrongest | Select points with strongest metrics |
size | Return size of points object |
selectUniform | Select uniformly distributed subset of point features |
select | Select point or region features during code generation |
Examples
Read an image into the workspace.
I = imread('licensePlates.jpg');Convert the image into a grayscale image.
I = im2gray(I);
Specify the location of keypoints in the image.
location = [400 398; ... 485 343; ... 274 323; ... 274 367; ... 241 313; ... 302 213];
Create an ORBPoints object and display its properties.
points = ORBPoints(location)
points =
6×1 ORBPoints array with properties:
Location: [6×2 single]
Metric: [6×1 single]
Count: 6
Scale: [6×1 single]
Orientation: [6×1 single]
Inspect the Scale and Orientation properties of the ORBPoints object.
points.Scale
ans = 6×1 single column vector
1
1
1
1
1
1
points.Orientation
ans = 6×1 single column vector
0
0
0
0
0
0
Specify the scale value for each keypoint.
scale = [2.1 2.5 2.5 4 2.3 3.9];
Specify the angle values for the keypoints as 0.7854 radians.
angle = 0.7854;
Create an ORBPoints object with the keypoints and the updated scale and angle values. The output is an ORBPoints object containing keypoints with the modified Scale and Orientation properties.
points = ORBPoints(location,'Scale',scale,'Orientation',angle);
Inspect the updated Scale values.
points.Scale
ans = 6×1 single column vector
2.1000
2.5000
2.5000
4.0000
2.3000
3.9000
Inspect the updated Orientation values. Since the Orientation value is a scalar, the object assigns same value to all keypoints.
points.Orientation
ans = 6×1 single column vector
0.7854
0.7854
0.7854
0.7854
0.7854
0.7854
Display the image and plot the ORB keypoints on the image.
figure
imshow(I)
hold on
plot(points)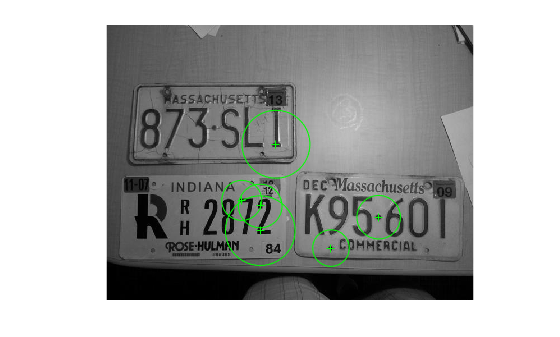
Read an image into the workspace.
I = imread('cameraman.tif');Use the detectORBFeatures function to detect ORB keypoints in the image. The function returns the detected ORB keypoints as an ORBPoints object.
points = detectORBFeatures(I);
Use the selectUniform object function to select 10 ORB keypoints. The output of the selectUniform object function is an ORBPoints object.
newPoints = selectUniform(points,10,size(I))
newPoints =
10×1 ORBPoints array with properties:
Location: [10×2 single]
Metric: [10×1 single]
Count: 10
Scale: [10×1 single]
Orientation: [10×1 single]
Display the location and scale of the selected keypoints on the image.
figure
imshow(I)
hold on
plot(newPoints)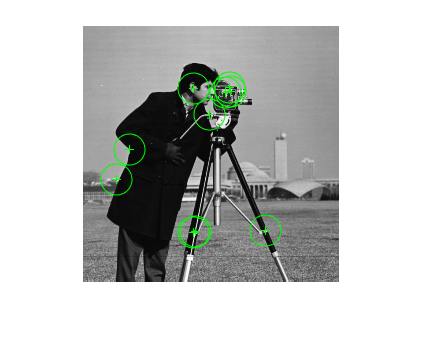
Display the (x, y) coordinates of the selected keypoints.
x = newPoints.Location(:,1); y = newPoints.Location(:,2); [x y]
ans = 10×2 single matrix
147 62
111 63
143 67
127 89
47 124
34 154
183 205
113 206
111 207
148 66
Display the orientation of the selected keypoints.
newPoints.Orientation
ans = 10×1 single column vector
5.4682
0.7888
5.3084
6.2443
2.8221
3.8440
6.1212
6.0344
4.8840
5.5535
Tips
Although ORBPoints can hold many points, it is a scalar object.
Therefore, numel(ORBPoints) always returns 1. This value can differ from
length(ORBPoints), which returns the true number of points held by the
object.
References
[1] Rublee, E., V. Rabaud, K. Konolige, and G. Bradski. "ORB: An Efficient Alternative to SIFT or SURF." In Proceedings of the 2011 International Conference on Computer Vision, pp. 2564–2571. Barcelona, Spain: IEEE, 2011.
Extended Capabilities
Version History
Introduced in R2019a