segmentObjects
Syntax
Description
masks = segmentObjects(detector,I)I using
SOLOv2 instance segmentation, and returns the predicted object masks for the input image
or images.
Note
This functionality requires Deep Learning Toolbox™ and the Computer Vision Toolbox™ Model for SOLOv2 Instance Segmentation. You can install the Computer Vision Toolbox Model for SOLOv2 Instance Segmentation from Add-On Explorer. For more information about installing add-ons, see Get and Manage Add-Ons.
[___] = segmentObjects(___,
specifies options using additional name-value arguments in addition to any combination of
arguments from previous syntaxes.. For example, Name=Value)Threshold=0.9 specifies
the confidence threshold as 0.9.
Examples
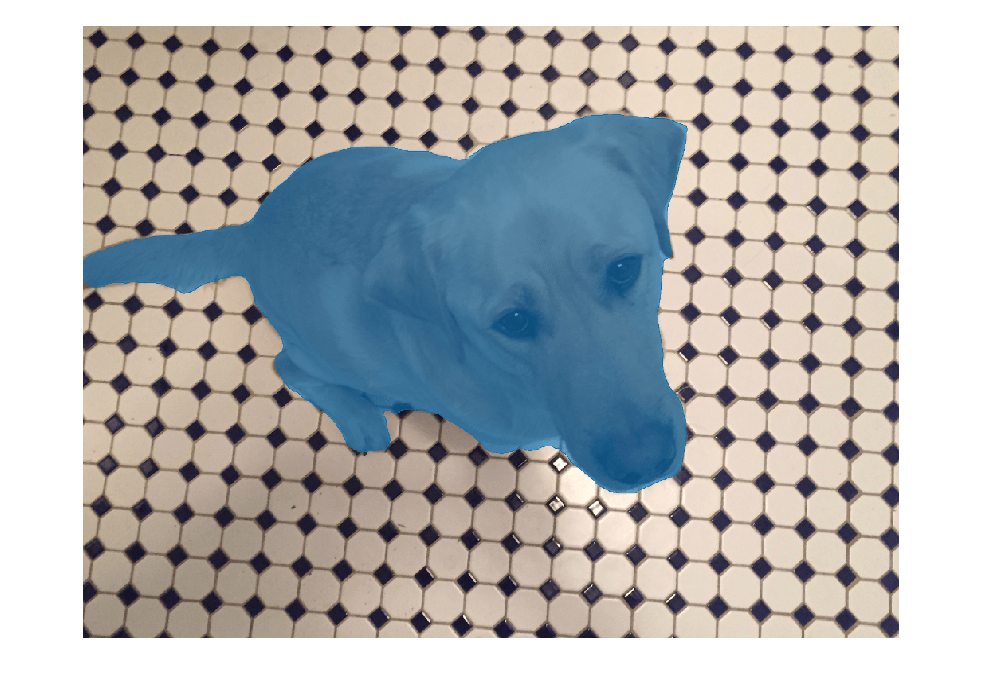
Create a pretrained SOLOv2 instance segmentation network.
model = solov2("light-resnet18-coco");Read a test image that includes objects that the network can detect, such as dogs, into the workspace.
I = imread("kobi.png");Segment instances of objects in the image using the SOLOv2 instance segmentation model.
[masks,labels,scores] = segmentObjects(model,I);
Display the instance segmentation results. Overlay the detected object instance mask on the test image.
overlayedImage = insertObjectMask(I,masks); imshow(overlayedImage)
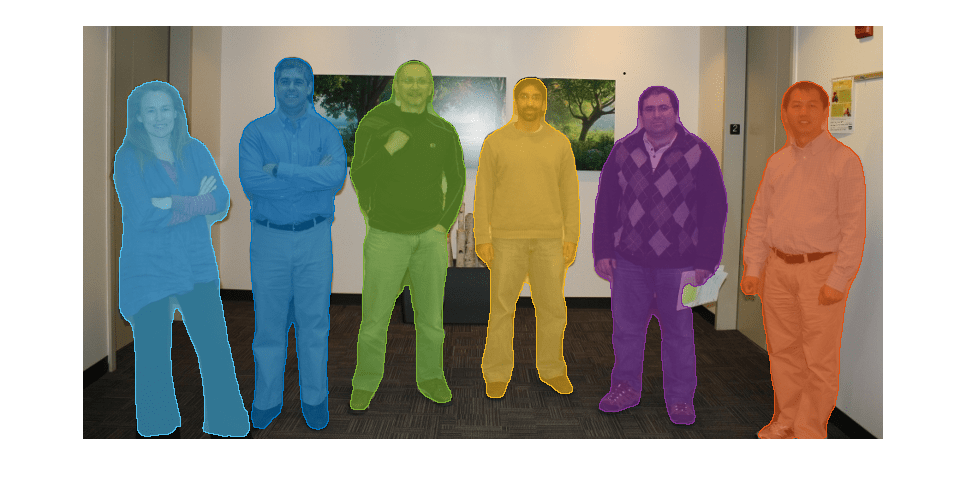
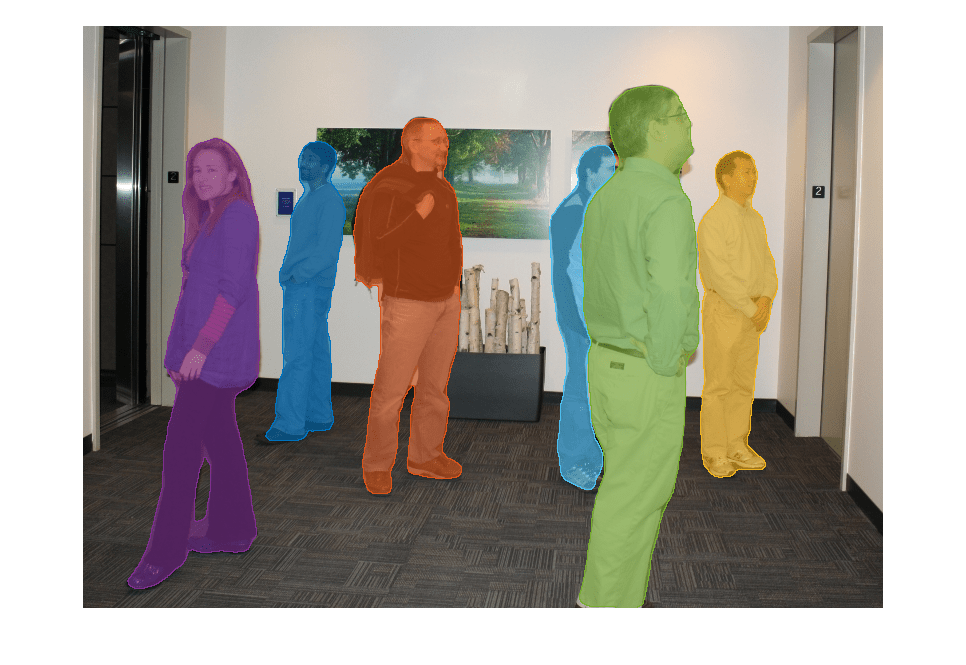
Load a pretrained SOLOv2 instance segmentation network.
model = solov2("resnet50-coco");Create a datastore of test images.
imageFiles = fullfile(toolboxdir("vision"),"visiondata","visionteam*.jpg"); dsTest = imageDatastore(imageFiles);
Segment instances of objects using the SOLOv2 instance segmentation model.
dsResults = segmentObjects(model,dsTest,Threshold=0.55);
Running SoloV2 network -------------------------- * Processed 2 images.
For each test image, display the instance segmentation results. Overlay the detected object masks on the test image.
while(hasdata(dsResults)) testImage = read(dsTest); results = read(dsResults); maskColors = lines(numel(results{2})); figure overlayedImage = insertObjectMask(testImage,results{1},Color=maskColors); imshow(overlayedImage) end