实例分割
实例分割是一种计算机视觉方法,它在执行需要精确目标定位和识别单个目标实例的任务中起着至关重要的作用,例如医学成像和自动驾驶任务。通过结合目标检测和语义分割的原理,实例分割可识别单个目标实例并逐像素描绘其边界,从而让您能够更精准地理解视觉数据。使用实例分割精确地识别、分类和分离图像中的单个目标。
您可以使用预训练的深度学习网络对图像运行推断,也可以使用迁移学习来训练网络。迁移学习是一种方法,通过这种方法,您可以从预训练网络开始,并根据您的应用基于自定义数据集对其进行训练。您可以使用图像标注器、视频标注器或真实值标注器 (Automated Driving Toolbox)来标注像素并导出标签数据,从而以交互方式生成用于训练的真实值数据。实例分割需要 Deep Learning Toolbox™。训练和推断支持支持 CUDA® 的 GPU。推荐使用 GPU,并且需要有 Parallel Computing Toolbox™。有关详细信息,请参阅MathWorks 产品中的并行计算支持 (Parallel Computing Toolbox)。
函数
主题
快速入门
- Get Started with Instance Segmentation Using Deep Learning
Segment objects using an instance segmentation model such as SOLOv2 or Mask R-CNN. - Get Started with SOLOv2 for Instance Segmentation
Perform multiclass instance segmentation using SOLOv2 and deep learning. - Getting Started with Mask R-CNN for Instance Segmentation
Perform multiclass instance segmentation using Mask R-CNN and deep learning.
训练用于实例分割的数据
- Get Started with Image Preprocessing and Augmentation for Deep Learning
Preprocess data for deep learning applications with deterministic operations such as resizing, or augment training data with randomized operations such as random cropping. - Datastores for Deep Learning (Deep Learning Toolbox)
Learn how to use datastores in deep learning applications.
精选示例
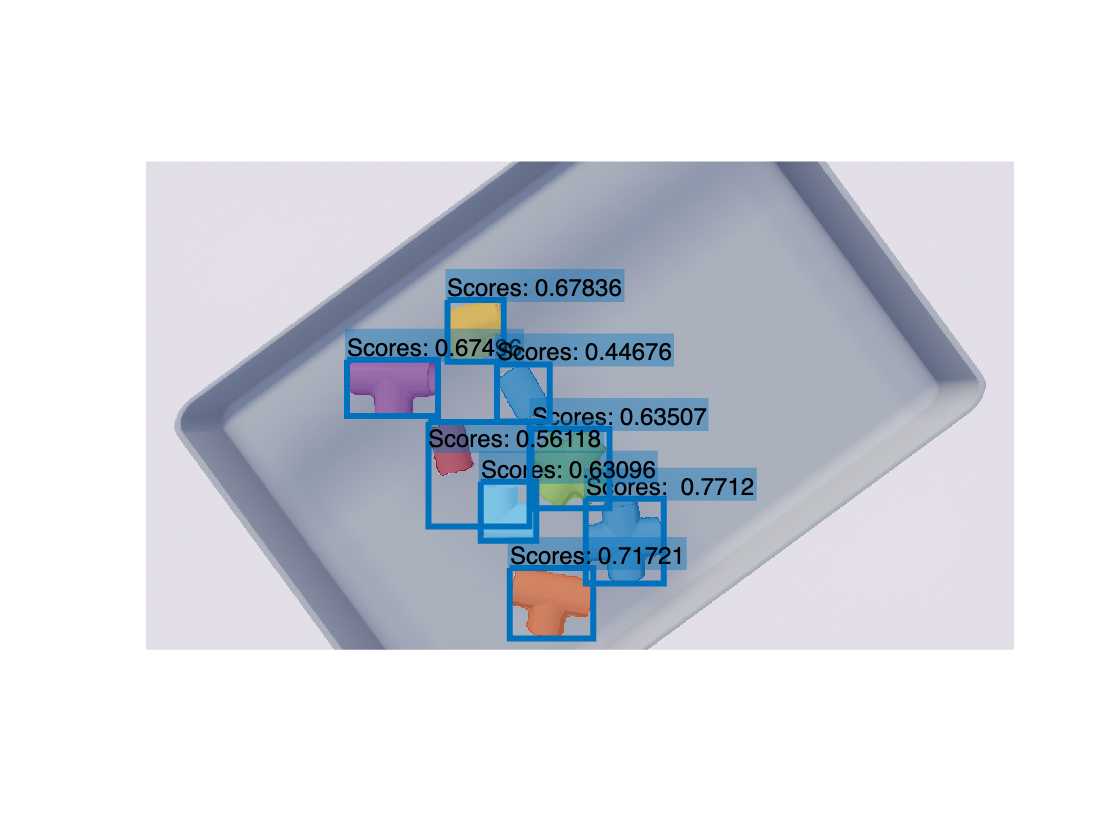
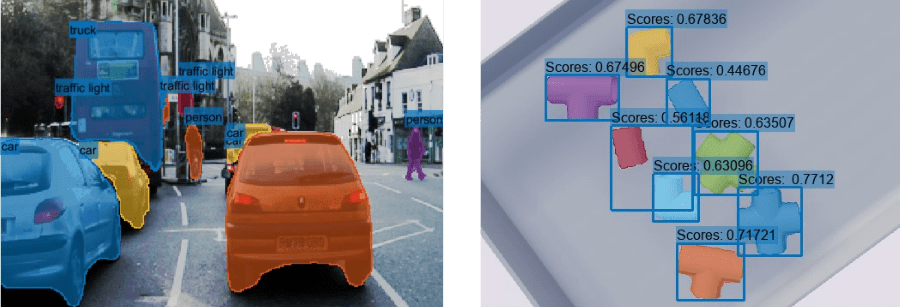
Perform Instance Segmentation Using SOLOv2
Segment object instances of randomly rotated machine parts in a bin using a deep learning SOLOv2 network.
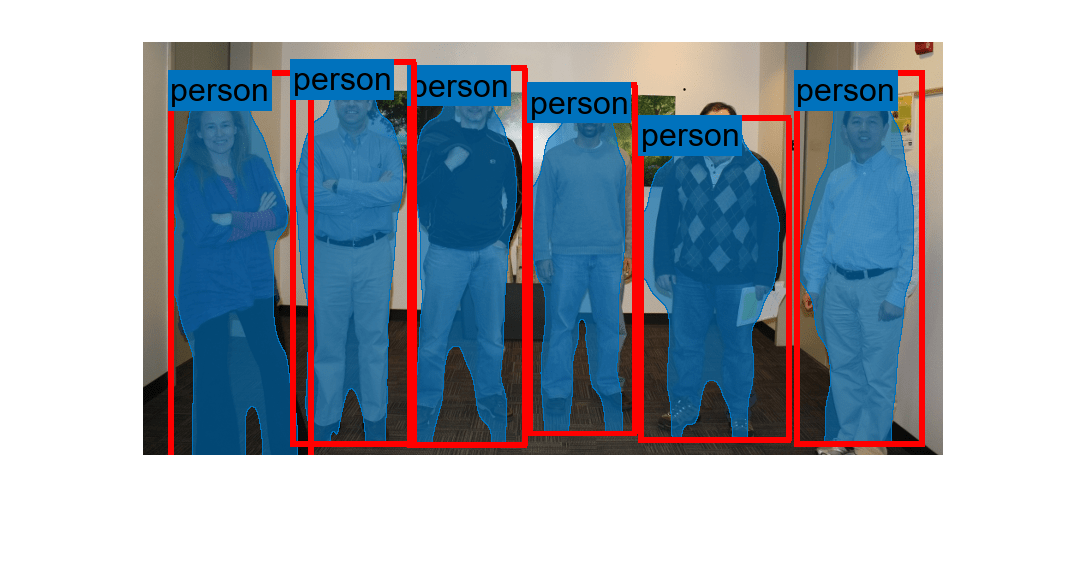
Perform Instance Segmentation Using Mask R-CNN
Segment individual instances of people and cars using a multiclass mask region-based convolutional neural network (R-CNN).
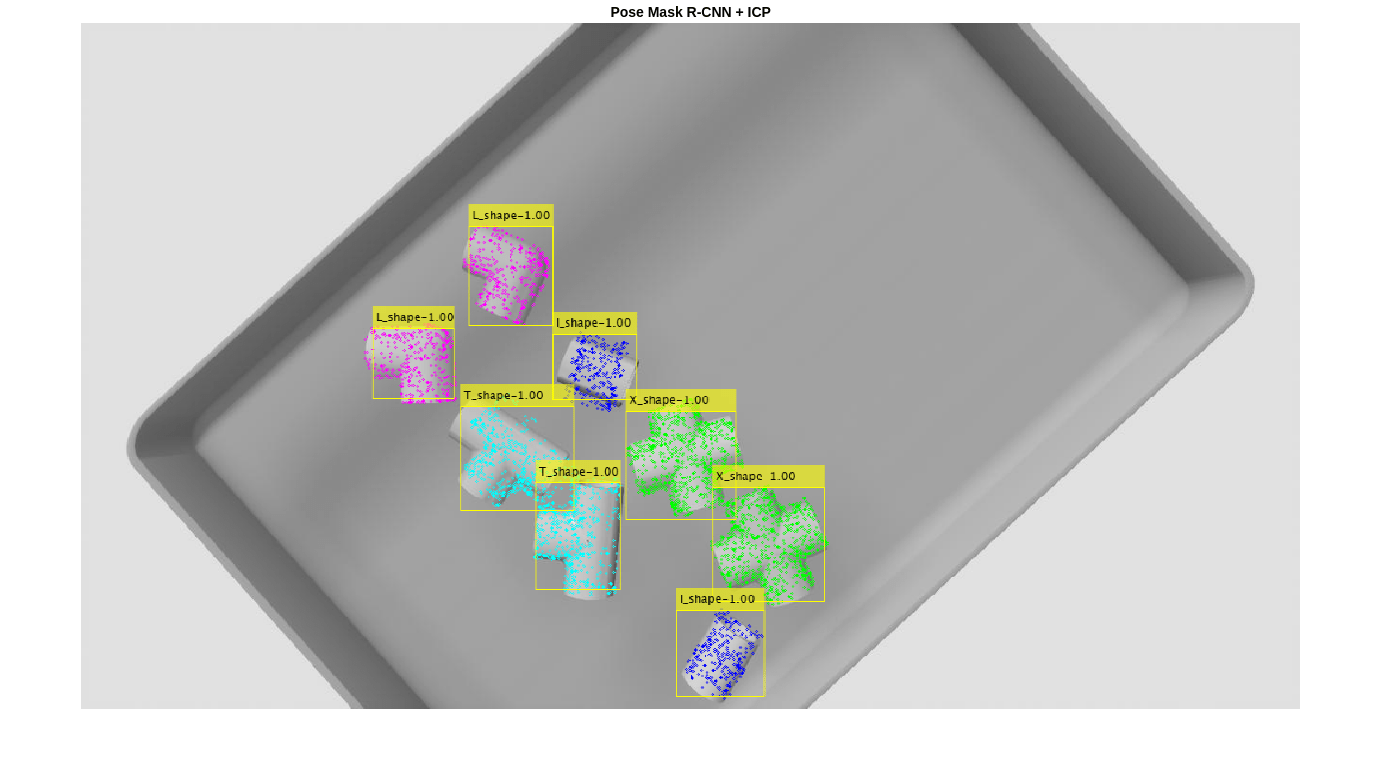
Perform 6-DoF Pose Estimation for Bin Picking Using Deep Learning
Perform six degrees-of-freedom (6-DoF) pose estimation by estimating the 3-D position and orientation of machine parts in a bin using RGB-D images and a deep learning network.