自动化视觉检查
自动化视觉检查 (AVI) 是一套用于对于制造产品缺陷进行检测和分类的方法。现代视觉检查使用机器学习和深度学习算法来辅助和改进质量保证流程。
自定义缺陷检测必须准确地确定给定图像中缺陷的位置,并对缺陷类别进行分类。一般情况下,您可以使用最先进的有监督深度学习模型来检测不同大小的缺陷,例如使用最新的 you only look once (YOLO) 算法。性能最优的模型能够实时表征和定位缺陷。
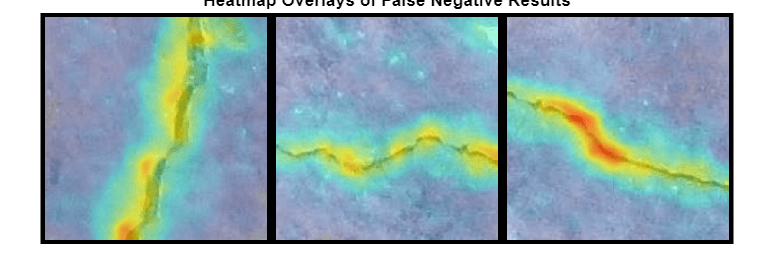
您可以使用异常检测深度学习方法来确定所制造产品的图像是正常还是异常。此外,您还可以使用异常定位生成精确且可解释的结果。您可以通过这种方法使用异常图来创建缺陷的可视化表示。
具体选择哪个检测模型来自动化视觉检查任务取决于若干因素。这些因素包括可用于正常和异常样本的训练数据量、要识别的异常类的数量以及理解和监控预测值所需的定位信息的类型。有关详细信息,请参阅Getting Started with Anomaly Detection Using Deep Learning。
要执行自动化视觉检查,请从附加功能资源管理器下载 Automated Visual Inspection Library for Computer Vision Toolbox™。有关下载附加功能的详细信息,请参阅获取和管理附加功能。某些功能还需要 Deep Learning Toolbox™。
函数
主题
- Getting Started with Anomaly Detection Using Deep Learning
Anomaly detection using deep learning is an increasingly popular approach to automating visual inspection tasks.
- Getting Started with YOLOX for Object Detection
Use the YOLOX object detector to detect small objects with improved performance.
精选示例

Count Objects Using CounTR Model
Demonstrates few-shot object counting using the Counting Transformer (CounTR) model, which counts objects in an image by identifying a few exemplars without additional training.

Perform Metrology Edge Measurements and Alignment
Perform distance measurements of fill lines in soda bottles using a caliper tool, and develop a classification model for normal and anomalous fill line images.
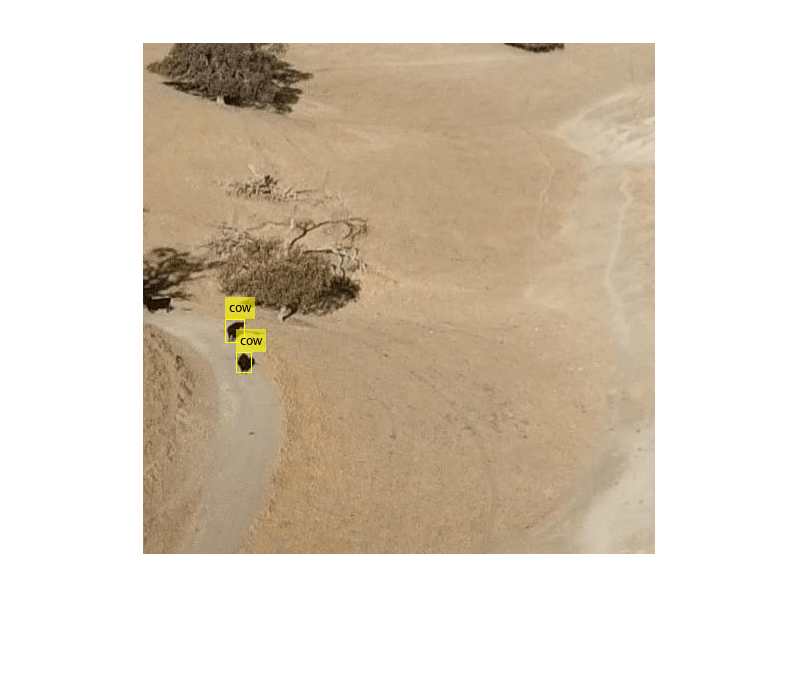
Detect Small Objects Using Tiled Training of YOLOX Network
Detect small objects in full-resolution images using tiled training of a you only look once version X (YOLOX) deep learning network.

Detect Defects Using Tiled Training of EfficientAD Anomaly Detector
Detect and localize defects on anomalous chewing gum images by training an EfficientAD anomaly detection network on tiled normal images.
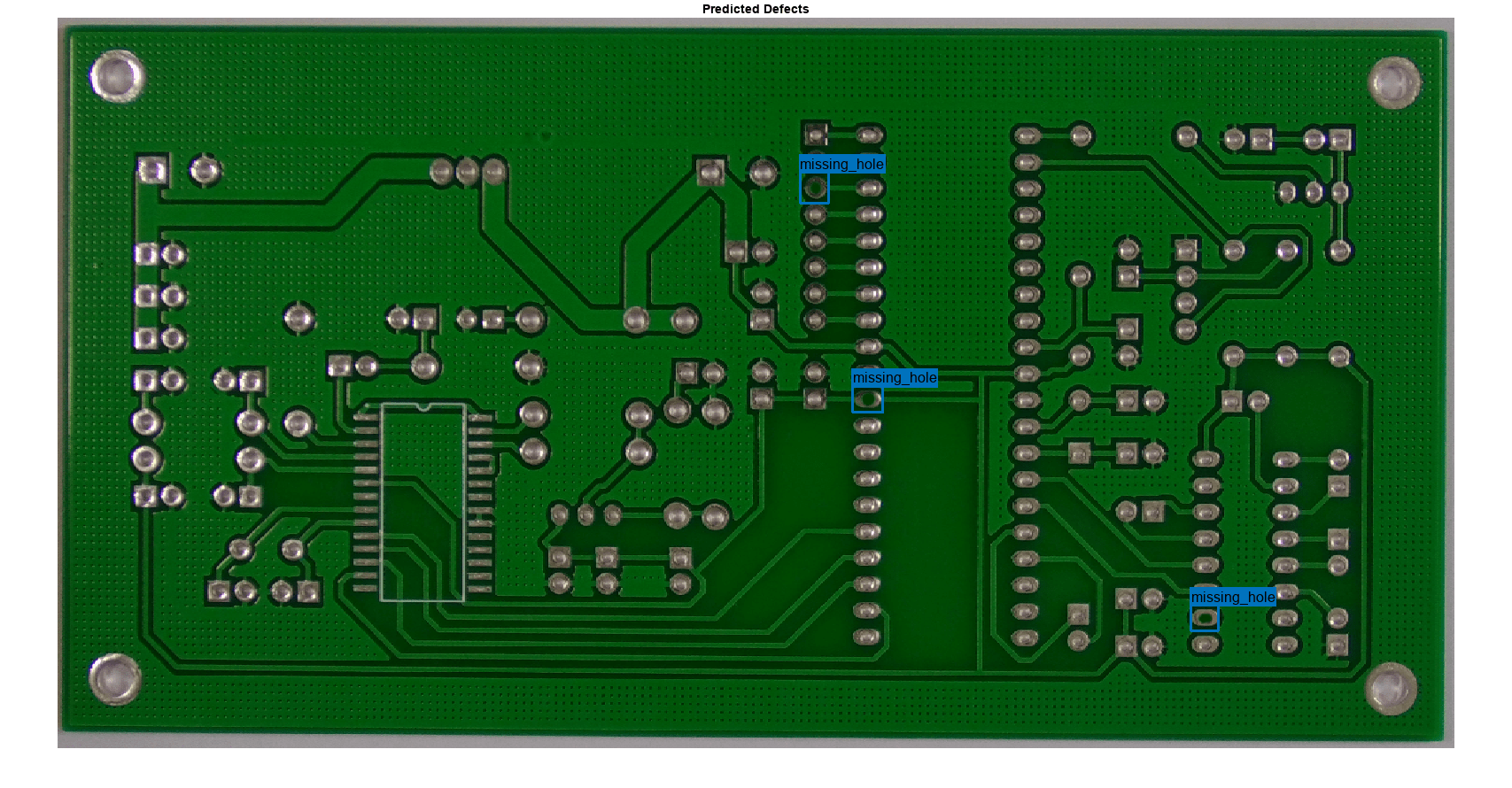
Detect Defects on Printed Circuit Boards Using YOLOX Network
Detect, localize, and classify defects in printed circuit boards (PCBs) using a you only look once version X (YOLOX) deep learning network.

Identify Defects in Air Compressors Using Spectrogram Images
Detect and localize defects in acoustic recordings of air compressors using Mel spectrogram images and an EfficientAD anomaly detector.
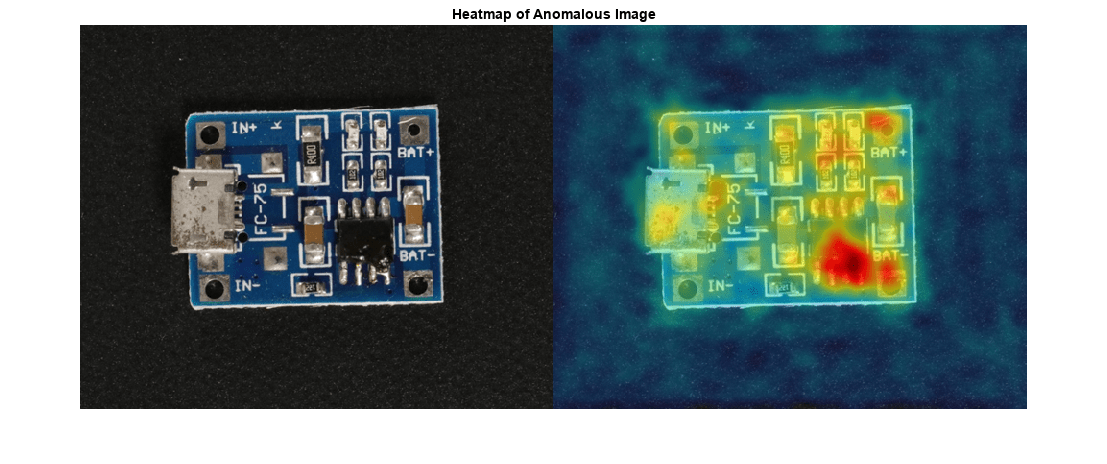
Localize Industrial Defects Using PatchCore Anomaly Detector
Perform localization of anomalous defects in printed circuit boards (PCBs) using anomaly heat maps generated with the PatchCore anomaly detector.
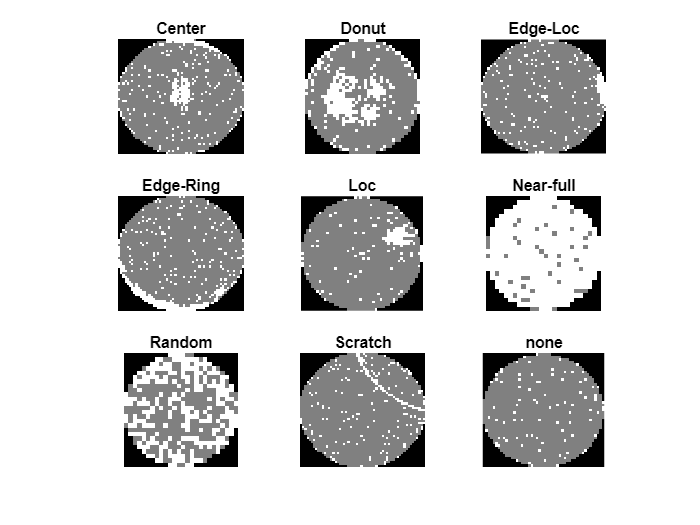
Classify Defects on Wafer Maps Using Deep Learning
Classify manufacturing defects on wafer maps using a simple convolutional neural network (CNN).
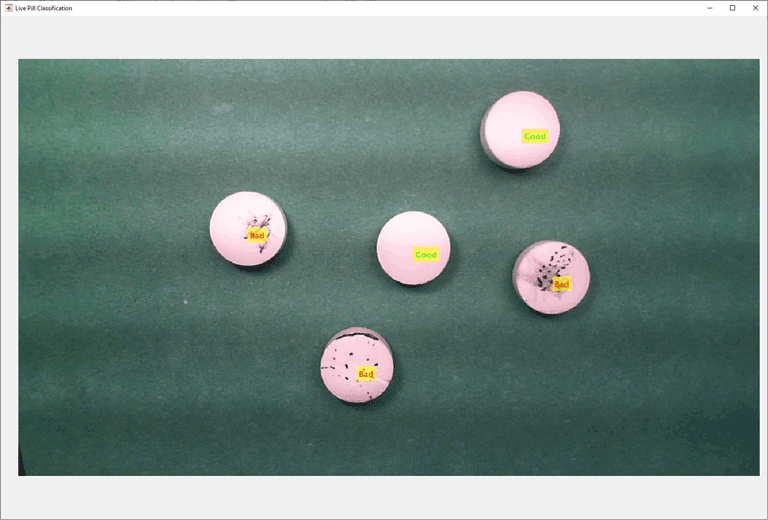
Detect Anomalies in Pills During Live Image Acquisition
Detect anomalies in pills during live image acquisition.
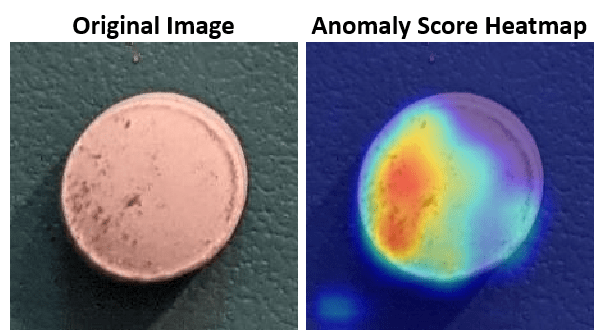
Detect Image Anomalies Using Explainable FCDD Network
Use an anomaly detector to distinguish between normal pills and pills with anomalous chips or contamination.
Detect Image Anomalies Using Pretrained ResNet-18 Feature Embeddings
Train a similarity-based anomaly detector using one-class learning of feature embeddings extracted from a pretrained ResNet-18 convolutional neural network.