drawImageAxesLabels
Description
[
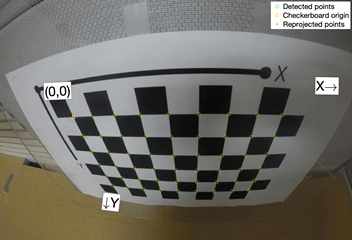
displays the orientation and location of the origin originLabel,xLabel,yLabel] = drawImageAxesLabels(detectorObj,imagePoints)originLabel and the
X- and Y-axis labels xLabel and
yLabel of the circle grid pattern detected in the images rendered in
the Camera Calibrator and Stereo Camera Calibrator apps.
If you do not implement this function, or if the returned values are empty, then the function does not render origin or axes labels in the image.
Examples
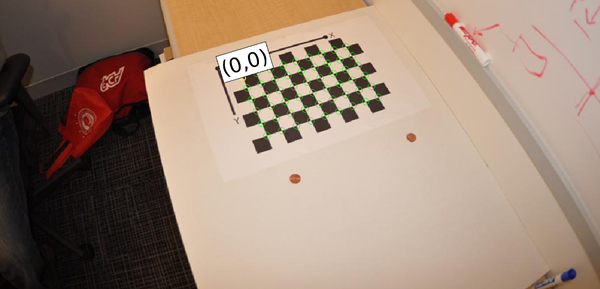
Use the drawImageAxesLabels function to identify and label the
orientation and location for the origin and the X- and
Y-axis labels of a detected pattern grid in an image. For
example:
Use this function template, which includes the use of the
drawImageAxesLabels object function, to calculate the orientation
and location of the origin of the detected calibration pattern in an image. The function
omits the X- and Y-labels. The function includes
both programmatic and app workflows for detecting the points.
function [originLabel,xLabel,yLabel] = drawImageAxesLabels(this,imagePoints) numBoardRows = this.BoardSize(1) - 1; numBoardCols = this.BoardSize(2) - 1; % Reshape checkerboard corners to boardSize-shaped array boardCoordsX = reshape(imagePoints(:,1),[numBoardRows numBoardCols]); boardCoordsY = reshape(imagePoints(:,2),[numBoardRows numBoardCols]); boardCoords = cat(3,boardCoordsX,boardCoordsY); % Origin label (check if the origin location is inside the image) if ~isnan(boardCoordsX(1,1)) p1 = boardCoords(1,1,:); refPointIdx = find(~isnan(boardCoordsX(:,1)),2); p2 = boardCoords(refPointIdx(2),1,:); refPointIdx = find(~isnan(boardCoordsX(1,:)),2); p3 = boardCoords(1,refPointIdx(2),:); [loc, theta] = getAxesLabelPosition(p1,p2,p3); originLabel.Location = loc; originLabel.Orientation = theta; else originLabel = struct; end % X-axis and Y-axis labels xLabel = struct('Orientation',[],'Location',[]); yLabel = struct('Orientation',[],'Location',[]); %-------------------------------------------------------------- % p1+v % \ % \ v1 % p1 ------ p2 % | % v2 | % | % p3 function [loc, theta] = getAxesLabelPosition(p1,p2,p3) v1 = p3 - p1; theta = -atan2d(v1(2),v1(1)); v2 = p2 - p1; v = -v1 - v2; d = hypot(v(1),v(2)); minDist = 40; if d < minDist v = (v/d) * minDist; end loc = p1 + v; end end
Input Arguments
Output Arguments
Version History
Introduced in R2021b