PMSM FeedForward Control
解耦 d 轴和 q 轴电流以消除扰动
库:
Motor Control Blockset /
Controls /
Control Reference
描述
PMSM FeedForward Control 模块可解耦 d 轴和 q 轴电流控制,并生成对应的前馈电压增益,以启用永磁同步电机 (PMSM) 的磁场定向控制。
您可以输入 d 轴和 q 轴电流的反馈值以及转子的机械转速。
该模块使用以下方法之一根据指定的电机参数生成前馈增益:
具有集总参数的线性模型 - 具有 d 轴和 q 轴定子绕组电感和永磁磁链的集总参数。
带 D、Q 磁链 LUT 的非线性模型 - 具有 d 轴和 q 轴磁链查找表的非线性模型。
带 Ld、Lq 和 FluxPM LUT 的非线性模型 - 具有 d 轴和 q 轴定子绕组电感和永磁磁链查找表的非线性模型。
基于输入端口的 Ld、Lq 和 FluxPM - 使用单独的输入端口提供 d 轴和 q 轴定子绕组电感和永磁磁链值。
此外,您还可以使用 Vsat 输入方法参数配置该模块,以通过输出饱和(V) 参数接受固定饱和电压,或通过单独的输入端口 Vsat 接受可变饱和电压。
方程
如果您在输入单位参数中选择标幺(PU),则该模块默认将按比例缩放内部参数以匹配标幺值范围。您还可以将该模块配置为在执行任何计算之前先将输入转换为 SI 单位,并在使用允许在 CodeGen 中使用缩小的电机参数(提升定点数据类型的精度) 参数计算输出后将其转换回标幺值。
下列方程描述模块如何计算前馈增益。
其中:
是电机中可用的极对数。
是对应于定子电压频率的电角速度(弧度/秒)。
和 是 d 轴和 q 轴定子绕组电感(亨)。
和 是 d 轴和 q 轴电流(安培)。
ψd 和 ψq 是沿 d 轴和 q 轴的磁通量(韦伯)。
ψm 是永磁磁链(韦伯)。
有关 Motor Control Blockset™ 用于 PMSM 的详细方程组和假设,请参阅 PMSM 的数学模型。
示例

PMSM 的弱磁控制(使用 MTPA)
此示例采用磁场定向控制 (FOC) 方法来控制三相永磁同步电机 (PMSM) 的转矩和转速。FOC 算法需要转子位置反馈,该反馈通过正交编码器获得。有关 FOC 的详细信息,请参阅磁场定向控制 (FOC)。
Field-Weakening Control (with MTPA) of Nonlinear PMSM Using Lookup Table
Uses a lookup table (LUT) for a nonlinear permanent magnet synchronous motor (PMSM) and controller to run the motor using field-weakening control (with maximum torque per ampere (MTPA)). Use this example to replicate and run a finite element analysis (FEA) based nonlinear, high-fidelity PMSM in simulation. This example helps motor design engineers to simulate high-performance motors in real-world motor control applications. In addition, control system engineers can use this example to design control algorithms for a given set of motor parameter data to achieve high levels of accuracy in tracking and controlling speed and torque as well as to meet efficiency requirements, especially for high-performance motors.
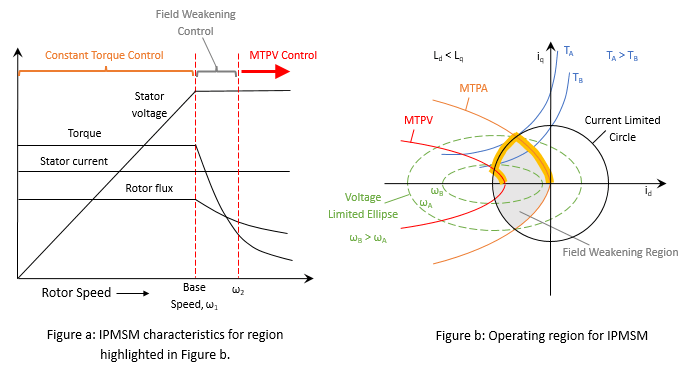
PMSM Drive Characteristics and Constraint Curves
Uses Motor Control Blockset™ to show how to use the PMSM characteristic plotting and PMSM milestone speed identification functions to obtain a control trajectory.
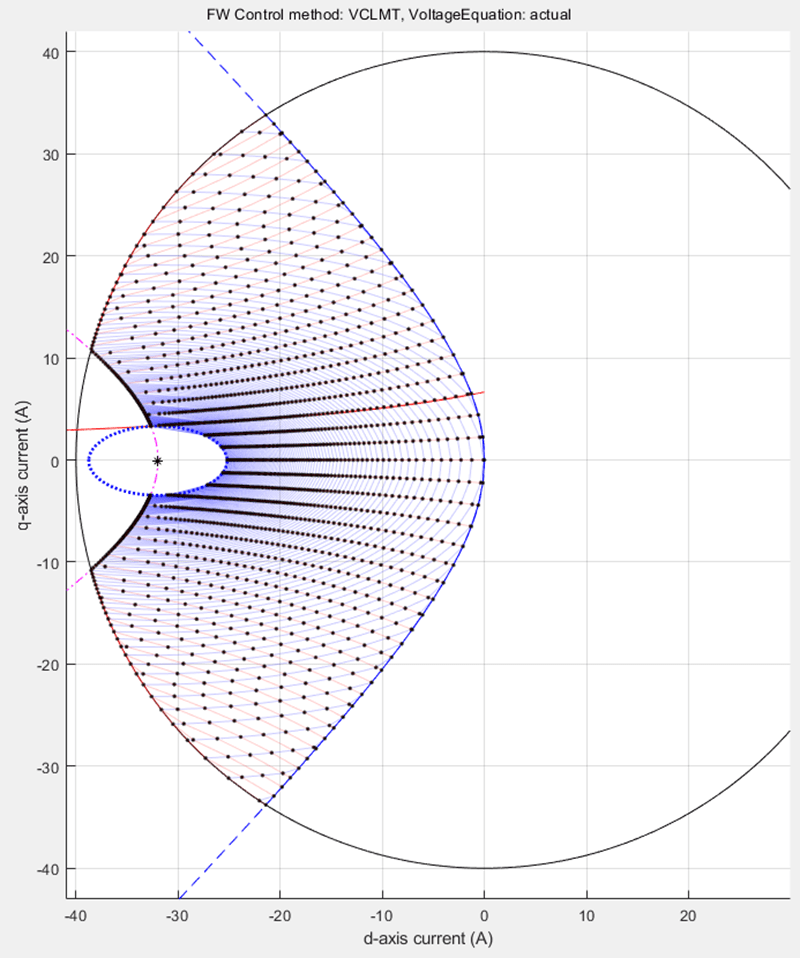
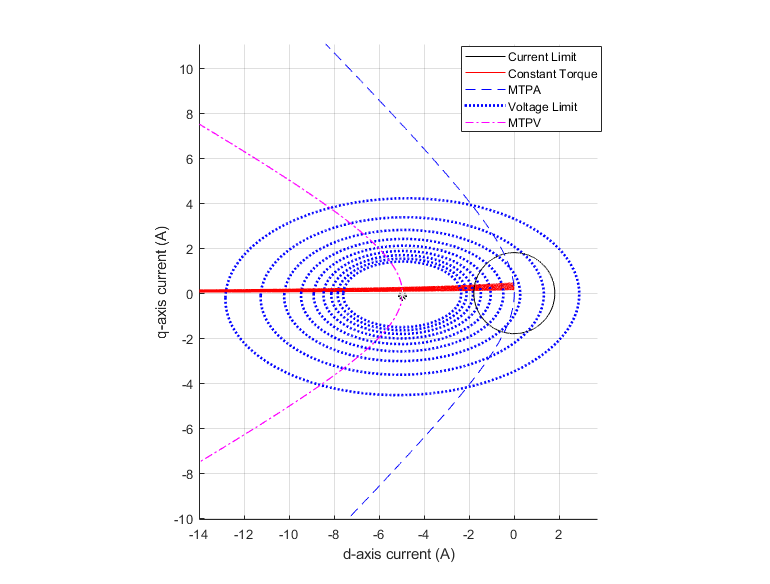
PMSM Constraint Curves and Their Application
Uses Motor Control Blockset™ to explain the fundamentals of constraint curves, utilization of these curves to determine operating currents, and usage of the grid of these currents in simulation or deployment environments.
端口
输入
输出
参数
扩展功能
版本历史记录
在 R2020a 中推出