lsimplot
Plot simulated time response of dynamic system to arbitrary inputs with additional plot customization options
Syntax
Description
lsimplot lets you plot simulated time response of dynamic
system to arbitrary inputs with a broader range of plot customization options than
lsim. You can use lsimplot to obtain the plot handle
and use it to customize the plot, such as modify the axes labels, limits and units. You can
also use lsimplot to draw a simulated time response plot on an existing set
of axes represented by an axes handle. To customize an existing simulated time response plot
using the plot handle:
Obtain the plot handle
Use
getoptionsto obtain the option setUpdate the plot using
setoptionsto modify the required options
For more information, see Customizing Response Plots from the Command Line. To create simulated time response plots with default
options or to extract simulated response data, use lsim.
h = lsimplot(sys)sys, where you can interactively specify the driving input(s), the time
vector, and initial state. It also returns the plot handle h. You can
use this handle h to customize the plot with the getoptions and setoptions commands.
For more information about using the Linear Simulation Tool for linear analysis, see Working with the Linear Simulation Tool.
h = lsimplot(sys,u,t)sys to the input signal
u and the corresponding time vector t. For MIMO
systems, u is a matrix with as many columns as the number of inputs and
whose ith row specifies the input value at time t(i).
For SISO systems, the input u can be specified either as a row or
column vector.
h = lsimplot(___,plotoptions)plotoptions. You can use these options to customize the plot
appearance using the command line. Settings you specify in plotoptions
overrides the preference settings in the MATLAB® session in which you run lsimplot. Therefore, this syntax
is useful when you want to write a script to generate multiple plots that look the same
regardless of the local preferences.
Examples
Customized Plot of Simulated Response to Arbitrary Input Signal
For this example, change time units to minutes and turn the grid on for the simulated response plot. Consider the following transfer function.
sys = tf(3,[1 2 3]);
To compute the response of this system to an arbitrary input signal, provide lsimplot with a vector of the times t at which you want to compute the response and a vector u containing the corresponding signal values. For instance, plot the system response to a ramping step signal that starts at 0 at time t = 0, ramps from 0 at t = 1 to 1 at t = 2, and then holds steady at 1. Define t and compute the values of u.
t = 0:0.04:8; u = max(0,min(t-1,1));
Use lsimplot plot the system response to the signal with a plot handle h.
h = lsimplot(sys,u,t);
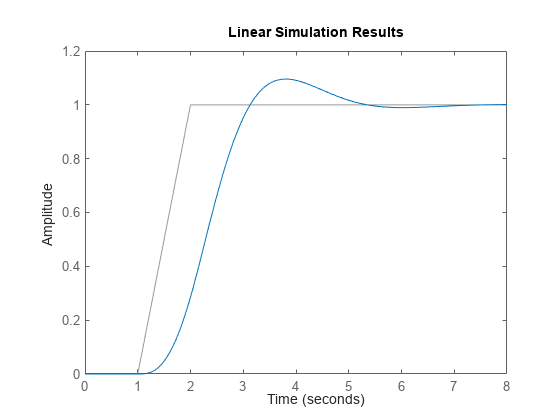
The plot shows the applied input (u,t) in gray and the system response in blue.
Use the plot handle to change the time units to minutes and to turn the grid on. To do so, edit properties of the plot handle, h using setoptions.
setoptions(h,'TimeUnits','minutes','Grid','on')
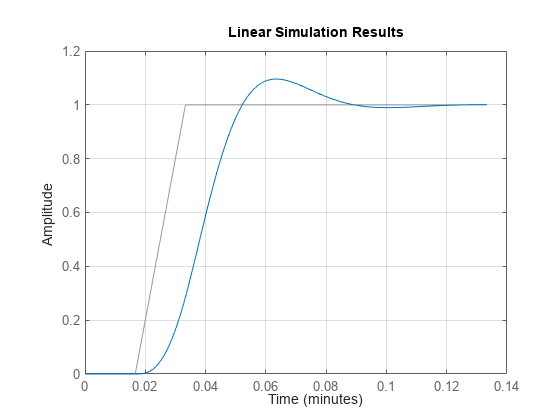
The plot automatically updates when you call setoptions.
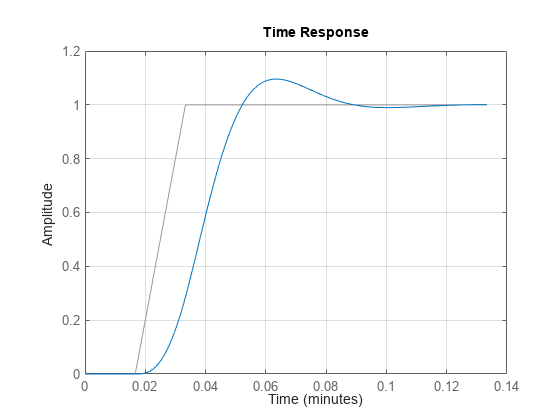
Alternatively, you can also use the timeoptions command to specify the required plot options. First, create an options set based on the toolbox preferences.
plotoptions = timeoptions('cstprefs');Change properties of the options set by setting the time units to minutes and enabling the grid.
plotoptions.TimeUnits = 'minutes'; plotoptions.Grid = 'on'; lsimplot(sys,u,t,plotoptions);
Customized Plot Response of Multiple Systems to Same Input
lsimplot allows you to plot the simulated responses of multiple dynamic systems on the same axis. For instance, compare the closed-loop response of a system with a PI controller and a PID controller. Then, customize the plot by enabling normalization and turning the grid on.
First, create a transfer function of the system and tune the controllers.
H = tf(4,[1 10 25]); C1 = pidtune(H,'PI'); C2 = pidtune(H,'PID');
Form the closed-loop systems.
sys1 = feedback(H*C1,1); sys2 = feedback(H*C2,1);
Plot the responses of both systems to a square wave with a period of 4 s.
[u,t] = gensig("square",4,12); h1 = lsimplot(sys1,sys2,u,t); legend("PI","PID")
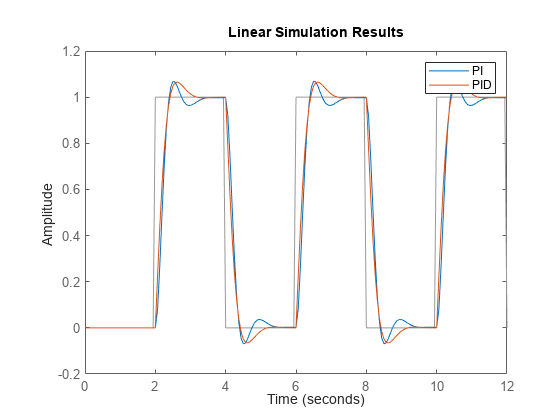
Use setoptions to enable normalization and to turn on the grid.
setoptions(h1,'Normalize','on','Grid','on')
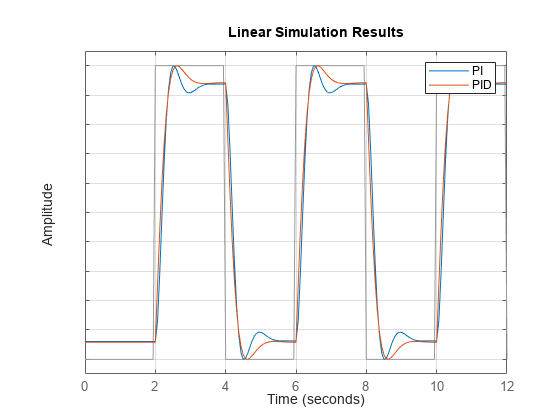
The plot automatically updates when you call setoptions.
By default, lsimplot chooses distinct colors for each system that you plot. You can specify colors and line styles using the LineSpec input argument.
h2 = lsimplot(sys1,"r--",sys2,"b",u,t); legend("PI","PID") setoptions(h2,'Normalize','on','Grid','on')
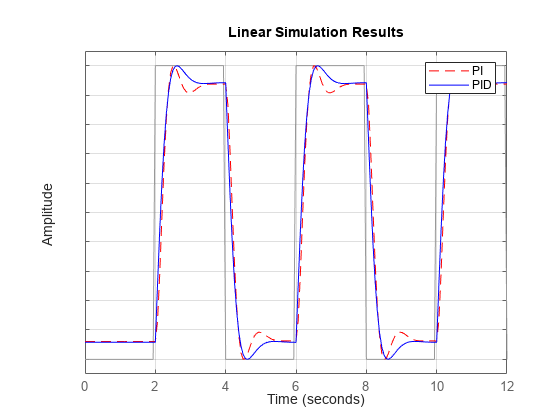
The first LineSpec "r--" specifies a dashed red line for the response with the PI controller. The second LineSpec "b" specifies a solid blue line for the response with the PID controller. The legend reflects the specified colors and line styles.
Custom Plot of System Evolution from Initial Condition
By default, lsimplot simulates the model assuming all states are zero at the start of the simulation. When simulating the response of a state-space model, use the optional x0 input argument to specify nonzero initial state values. Consider the following two-state SISO state-space model.
A = [-1.5 -3;
3 -1];
B = [1.3; 0];
C = [1.15 2.3];
D = 0;
sys = ss(A,B,C,D);Suppose that you want to allow the system to evolve from a known set of initial states with no input for 2 s, and then apply a unit step change. Specify the vector x0 of initial state values, and create the input vector.
x0 = [-0.2 0.3]; t = 0:0.05:8; u = zeros(length(t),1); u(t>=2) = 1;
First, create a default options set using timeoptions.
plotoptions = timeoptions;
Next change the required properties of the options set plotoptions and plot the simulated response with the zero order hold option.
plotoptions.Title.FontSize = 15; plotoptions.Title.Color = [0 0 1]; plotoptions.Grid = 'on'; h = lsimplot(sys,u,t,x0,plotoptions,'zoh'); hold on title('Simulated Time Response with Initial Conditions')
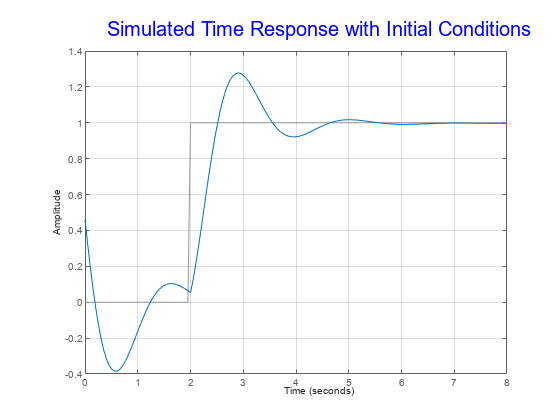
The first half of the plot shows the free evolution of the system from the initial state values [-0.2 0.3]. At t = 2 there is a step change to the input, and the plot shows the system response to this new signal beginning from the state values at that time. Because plotoptions begins with a fixed set of options, the plot result is independent of the toolbox preferences of the MATLAB session.
Input Arguments
Output Arguments
Version History
Introduced before R2006a
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)