Visualization and Analytics
Use theaterPlot to plot ground truth, coverages, detections, and
tracks. Get error metrics for tracks using trackErrorMetrics. Analyze and compare performance of
multi-object tracking systems using trackAssignmentMetrics, trackOSPAMetric, and trackGOSPAMetric.
Functions
Blocks
Topics
- Configure Time Scope MATLAB Object
Customize
timescopeproperties and use measurement tools.
Featured Examples
Introduction to Tracking Metrics
While designing a multi-object tracking system, it is essential to devise a method to evaluate its performance against the available ground truth. This ground truth is typically available from a simulation environment or by using techniques like ground-truth extraction using manual or automated labeling on recorded data. Though it is possible to qualitatively evaluate a tracking algorithm using visualization tools, the approach is usually not scalable. This example introduces different quantitative analysis tools in Sensor Fusion and Tracking Toolbox™ for assessing a tracker's performance. You will also use some common events like false tracks, track swaps etc. encountered while tracking multiple objects to understand the strengths and limitations of these tools.
Use theaterPlot to Visualize Tracking Scenario
Use the theaterPlot object to visualize various aspects of a tracking scenario.
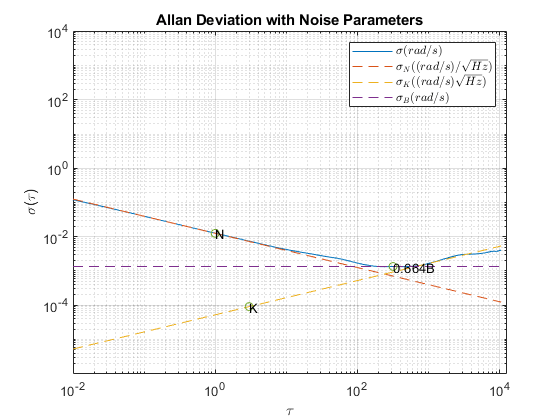
Inertial Sensor Noise Analysis Using Allan Variance
Use the Allan variance to determine noise parameters of a MEMS gyroscope. These parameters can be used to model the gyroscope in simulation. The gyroscope measurement is modeled as:

Magnetometer Calibration
Magnetometers detect magnetic field strength along a sensor's X,Y and Z axes. Accurate magnetic field measurements are essential for sensor fusion and the determination of heading and orientation.