线性模型辨识
当线性模型足以完全捕获系统动态特性时,可使用线性模型辨识。您可以在系统辨识或命令行中辨识线性模型。System Identification Toolbox™ 可用于创建和估计四种一般类型的线性模型。
参数化模型 - 估计传递函数模型、线性状态空间模型、多项式模型和过程模型等结构体中的参数。
频率响应模型 - 使用频谱分析估计频谱模型。
相关性模型 - 使用相关性分析对冲激响应模型进行非参数化估计。
线性灰盒模型 - 结合从先验知识获得或从物理原理推导出的系统信息,估计任意常微分方程或常差分方程的系数。
线性模型辨识需要频域数据或均匀采样的时域数据。您的数据可以有一个或多个输入和输出通道。有关详细信息,请参阅About Identified Linear Models。您还可以使用 AR 和 ARMA 等参数化模型结构对包含单个输出通道而无输入通道的时间序列数据进行建模。
您可以使用辨识模型在命令行、App 或 Simulink® 中仿真和预测模型输出。
类别
- 线性模型辨识基础知识
辨识线性模型、选择合适的模型结构、构建和修改模型对象结构以及使用正则化估计的基本信息
- 过程模型
具有静态增益、时间常数和输入/输出延迟的低阶传递函数模型
- 输入-输出多项式模型
输入-输出多项式模型,包括 ARX、ARMAX、输出-误差和博克斯-詹金斯模型结构
- 状态空间模型
具有自由、标准和结构化参数化的状态空间模型;等效 ARMAX 和输出-误差 (OE) 模型
- 传递函数模型
传递函数模型
- 线性灰盒模型
估计线性微分方程、差分方程和状态空间方程的系数
- 频率响应模型
利用频谱分析获得的频率响应模型
- 相关性模型
利用相关性分析获得的冲激响应模型
精选示例
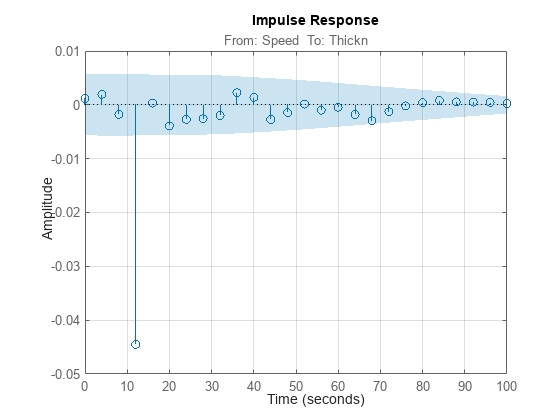
Glass Tube Manufacturing Process
Linear model identification of a glass tube manufacturing process.
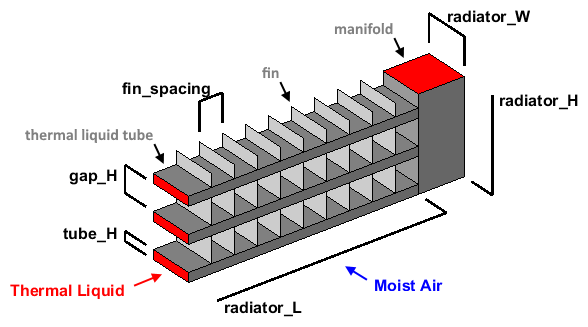
估计热交换器的传递函数模型
此示例说明如何根据测量信号数据估计传递函数。
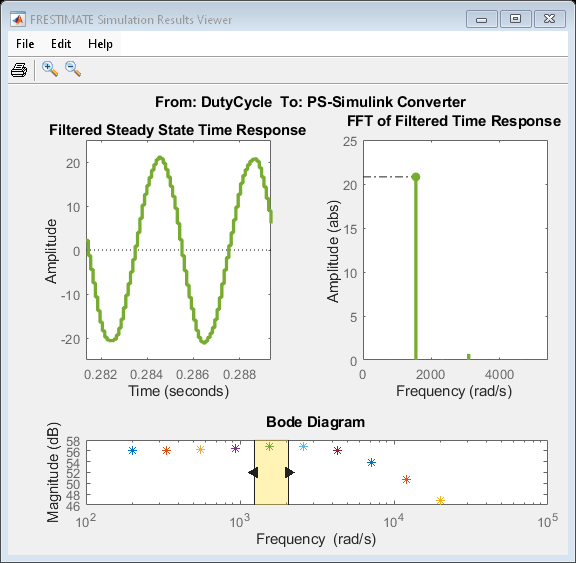
估计 Boost 转换器的传递函数模型
此示例显示如何根据频率响应数据估计传递函数。
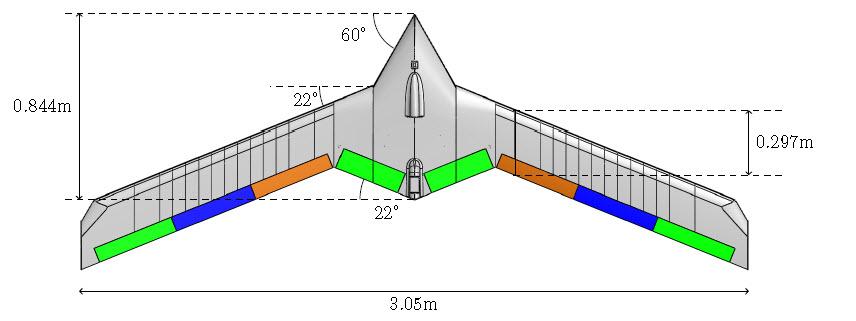
柔性翼飞机的模态分析
此示例展示了柔性翼飞机弯曲模式的计算。
Comparison of Various Model Identification Methods
Several identification methods available in System Identification Toolbox.

使用 Simulink 数据进行连续时间模型建模
此示例说明了如何使用 System Identification Toolbox™ 识别在 Simulink® 中仿真的模型。该示例阐述了如何处理连续时间系统与延迟,同时强调了输入信号采样间行为的重要性。

通过辨识对复杂系统进行线性逼近
本示例演示了如何通过线性模型辨识,获得一个复非线性系统的线性逼近。
分析多变量系统中的数据并辨识模型
收集 MIMO 数据,估计和比较模型,并查看相应的模型响应。
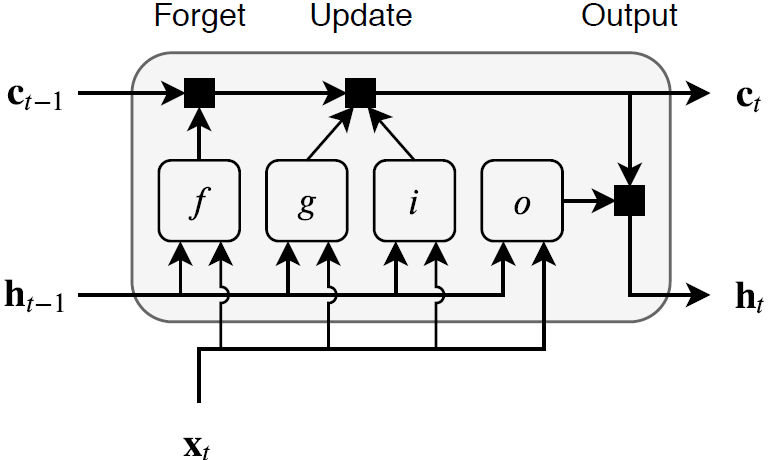
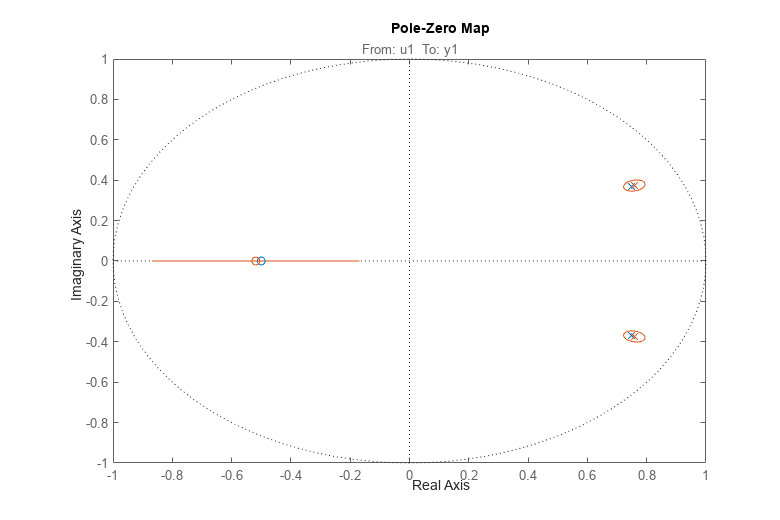
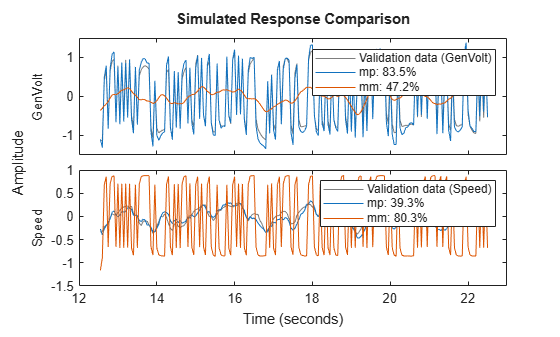
使用 LSTM 网络进行线性系统辨识
本示例演示了如何使用长短期记忆 (LSTM) 神经网络对线性系统进行估计,并将该方法与传递函数估计方法进行了比较。