六相 PMSM 的磁场定向控制
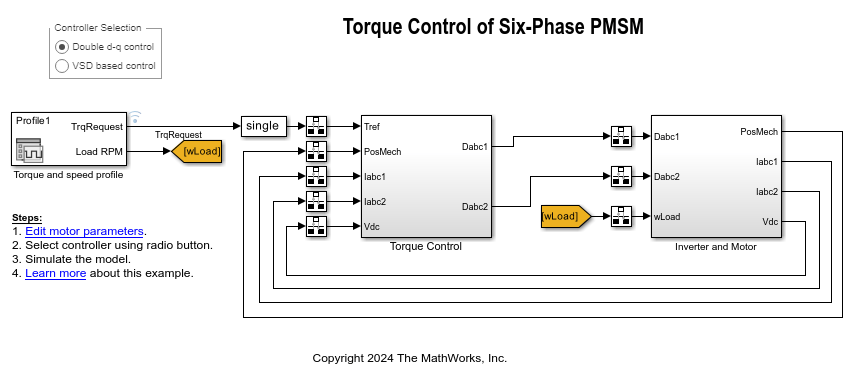
此示例说明如何使用磁场定向控制 (FOC) 来控制非对称六相永磁同步电机 (PMSM) 的转矩。
您可以将六相 PMSM 的六个绕组视为两组三相绕组:
a1、b1、c1
a2、b2、c2
六相 PMSM 可以根据两组三相绕组之间的空间角度(或空间位移)具有不同配置。非对称六相 PMSM 具有 30 电气角度的空间角度,如下图所示。

被控对象模型
该示例使用 PMSM (Six-Phase) (Simscape Electrical) 模块为非对称六相 PMSM 实现被控对象模型。该被控对象模型使用两个单独的逆变器来驱动电机。这些逆变器使用单独的 PWM 开关序列来生成两组三相电压,以驱动对应的三相电机绕组。
控制器算法
该示例提供以下两种控制算法来控制六相电机:
双 d-q 控制 - 此控制算法使用的控制策略将六相 PMSM 视为两个三相电机的组合。它使用单独的电流控制算法(利用克拉克、帕克和反向帕克数学变换)来控制与每个三相电机关联的转矩。
如果您选择此控制算法,该示例将使用可变子系统 SixPhasePMSMTorqueControl/Torque Control/Controller/Double d-q Control 来控制各组三相绕组。
基于 VSD 的控制 - 此控制算法使用的控制策略将六相 PMSM 视为单一单元。该变体使用单一电流控制算法(利用 VSD 和逆 VSD 变换)直接控制六相 PMSM 的转矩。
如果您选择此控制算法,该示例将使用可变子系统 SixPhasePMSMTorqueControl/Torque Control/Controller/VSD based Control 来控制六相 PMSM。
注意:该示例使用在 SixPhasePMSMTorqueControl/Torque Control/Control gain computation/Gain Computation - DQ 子系统中可用的 FOC Default Controller Gains 模块来计算由这两种控制算法实现的 PI 控制器的增益( 和
和  )。
)。
模型
该示例包含 Simulink® 模型 SixPhasePMSMTorqueControl。
您可以使用此模型进行仿真。
必需的 MathWorks 产品
Motor Control Blockset™
Simscape™ Electrical™
前提条件
1.获取电机参数。Simulink 模型使用默认电机参数,您可以用电机数据表或其他来源的值替换这些参数。
2.在与 Simulink 模型关联的模型初始化脚本 SixPhasePMSMTorqueControlData 中更新电机和逆变器参数。有关模型初始化脚本的更多详细信息,请参阅模型初始化脚本。
仿真模型
此示例支持仿真。请按照以下步骤对 Simulink 模型进行仿真。
1.打开此示例附带的 Simulink 模型 SixPhasePMSMTorqueControl。
2.使用控制器选择部分中提供的以下单选按钮来选择您要用于非对称六相 PMSM 的控制算法:
双 d-q 控制
基于 VSD 的控制
3.要对 Simulink 模型进行仿真,请点击仿真选项卡上的运行。
4.要查看和分析仿真结果,请点击仿真选项卡上的数据检查器。
另请参阅
6-Phase VSD Transform | 6-Phase Inverse VSD Transform | PMSM (Six-Phase) (Simscape Electrical) | Park Transform | Inverse Park Transform | Field-Oriented Current Controller | FOC Default Controller Gains | Clarke Transform | PWM Reference Generator
主题
- 六相 PMSM 转矩控制 (Simscape Electrical)
- 六相 PMSM 速度控制 (Simscape Electrical)