interpolateSolution
Interpolate PDE solution to arbitrary points
Syntax
Description
uintrp = interpolateSolution(results,querypoints)querypoints.
uintrp = interpolateSolution(___,iT)iT. For a system of time-dependent or eigenvalue
equations, specify both time/modal indices iT and equation
indices iU
Examples
Interpolate the solution to a scalar problem along a line and plot the result.
Create the solution to the problem on the L-shaped membrane with zero Dirichlet boundary conditions.
model = createpde; geometryFromEdges(model,@lshapeg); applyBoundaryCondition(model,"dirichlet", ... "Edge",1:model.Geometry.NumEdges, ... "u",0); specifyCoefficients(model,"m",0,... "d",0,... "c",1,... "a",0,... "f",1); generateMesh(model,"Hmax",0.05); results = solvepde(model);
Interpolate the solution along the straight line from (x,y) = (-1,-1) to (1,1). Plot the interpolated solution.
xq = linspace(-1,1,101); yq = xq; uintrp = interpolateSolution(results,xq,yq); plot(xq,uintrp) xlabel("x") ylabel("u(x)")

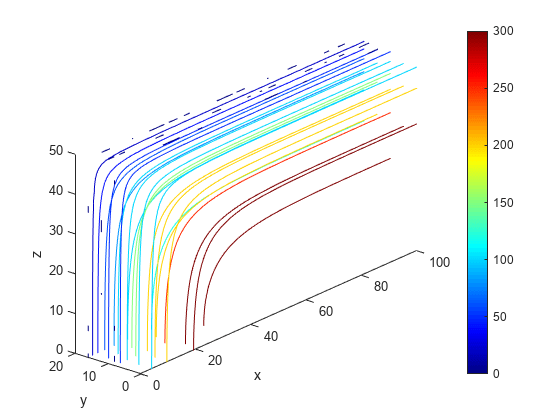
Calculate the mean exit time of a Brownian particle from a region that contains absorbing (escape) boundaries and reflecting boundaries. Use the Poisson's equation with constant coefficients and 3-D rectangular block geometry to model this problem.
Create the solution for this problem.
model = createpde; importGeometry(model,"Block.stl"); applyBoundaryCondition(model,"dirichlet","Face",[1,2,5],"u",0); specifyCoefficients(model,"m",0,... "d",0,... "c",1,... "a",0,... "f",2); generateMesh(model); results = solvepde(model);
Create a grid and interpolate the solution to the grid.
[X,Y,Z] = meshgrid(0:135,0:35,0:61); uintrp = interpolateSolution(results,X,Y,Z); uintrp = reshape(uintrp,size(X));
Create a contour slice plot for five fixed values of the y coordinate.
contourslice(X,Y,Z,uintrp,[],0:4:16,[]) colormap jet xlabel("x") ylabel("y") zlabel("z") xlim([0,100]) ylim([0,20]) zlim([0,50]) axis equal view(-50,22) colorbar
Solve a scalar stationary problem and interpolate the solution to a dense grid.
Create the solution to the problem on the L-shaped membrane with zero Dirichlet boundary conditions.
model = createpde; geometryFromEdges(model,@lshapeg); applyBoundaryCondition(model,"dirichlet", ... "Edge",1:model.Geometry.NumEdges, ... "u",0); specifyCoefficients(model,"m",0,"d",0,"c",1,"a",0,"f",1); generateMesh(model,"Hmax",0.05); results = solvepde(model);
Interpolate the solution on the grid from –1 to 1 in each direction.
v = linspace(-1,1,101); [X,Y] = meshgrid(v); querypoints = [X(:),Y(:)]'; uintrp = interpolateSolution(results,querypoints);
Plot the resulting interpolation on a mesh.
uintrp = reshape(uintrp,size(X)); mesh(X,Y,uintrp) xlabel("x") ylabel("y")

Create the solution to a two-component system and plot the two components along a planar slice through the geometry.
Create a PDE model for two components. Import the geometry of a torus.
model = createpde(2); importGeometry(model,"Torus.stl"); pdegplot(model,"FaceLabels","on");

Set boundary conditions.
gfun = @(region,state)[0,region.z-40]; applyBoundaryCondition(model,"neumann","Face",1,"g",gfun); ufun = @(region,state)[region.x-40,0]; applyBoundaryCondition(model,"dirichlet","Face",1,"u",ufun);
Set the problem coefficients.
specifyCoefficients(model,"m",0,... "d",0,... "c",[1;0;1;0;0;1;0;0;1;0;1; 0;1;0;0;1;0;1;0;0;1],... "a",0,... "f",[1;1]);
Create a mesh and solve the problem.
generateMesh(model); results = solvepde(model);
Interpolate the results on a plane that slices the torus for each of the two components.
[X,Z] = meshgrid(0:100); Y = 15*ones(size(X)); uintrp = interpolateSolution(results,X,Y,Z,[1,2]);
Plot the two components.
sol1 = reshape(uintrp(:,1),size(X));
sol2 = reshape(uintrp(:,2),size(X));
figure
surf(X,Z,sol1)
title("Component 1")
figure
surf(X,Z,sol2)
title("Component 2")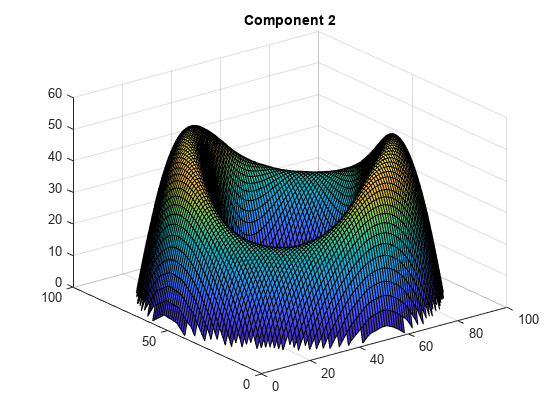
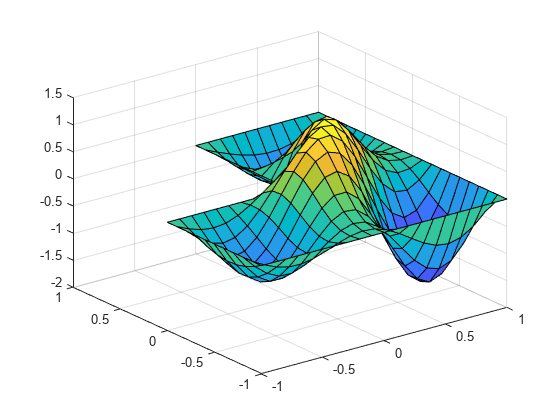
Solve a scalar eigenvalue problem and interpolate one eigenvector to a grid.
Find the eigenvalues and eigenvectors for the L-shaped membrane.
model = createpde(1); geometryFromEdges(model,@lshapeg); applyBoundaryCondition(model,"dirichlet", ... "Edge",1:model.Geometry.NumEdges, ... "u",0); specifyCoefficients(model,"m",0,... "d",1,... "c",1,... "a",0,... "f",0); r = [0,100]; generateMesh(model,"Hmax",1/50); results = solvepdeeig(model,r);
Interpolate the eigenvector corresponding to the fifth eigenvalue to a coarse grid and plot the result.
[xq,yq] = meshgrid(-1:0.1:1); uintrp = interpolateSolution(results,xq,yq,5); uintrp = reshape(uintrp,size(xq)); surf(xq,yq,uintrp)
Solve a system of time-dependent PDEs and interpolate the solution.
Import slab geometry for a 3-D problem with three solution components. Plot the geometry.
model = createpde(3); importGeometry(model,"Plate10x10x1.stl"); pdegplot(model,"FaceLabels","on","FaceAlpha",0.5)
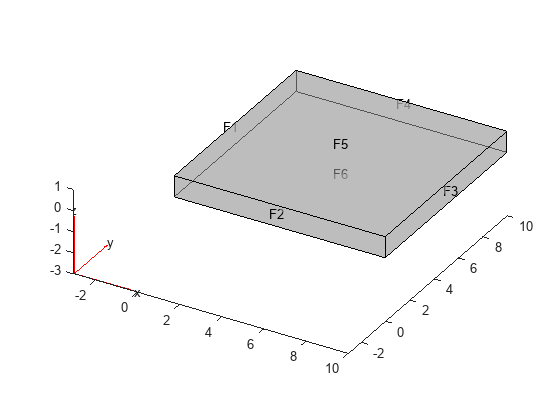
Set boundary conditions such that face 2 is fixed (zero deflection in any direction) and face 5 has a load of 1e3 in the positive z-direction. This load causes the slab to bend upward. Set the initial condition that the solution is zero, and its derivative with respect to time is also zero.
applyBoundaryCondition(model,"dirichlet","Face",2,"u",[0,0,0]); applyBoundaryCondition(model,"neumann","Face",5,"g",[0,0,1e3]); setInitialConditions(model,0,0);
Create PDE coefficients for the equations of linear elasticity. Set the material properties to be similar to those of steel. See Linear Elasticity Equations.
E = 200e9; nu = 0.3; specifyCoefficients(model,"m",1,... "d",0,... "c",elasticityC3D(E,nu),... "a",0,... "f",[0;0;0]);
Generate a mesh, setting Hmax to 1.
generateMesh(model,"Hmax",1);Solve the problem for times 0 through 5e-3 in steps of 1e-4.
tlist = 0:1e-4:5e-3; results = solvepde(model,tlist);
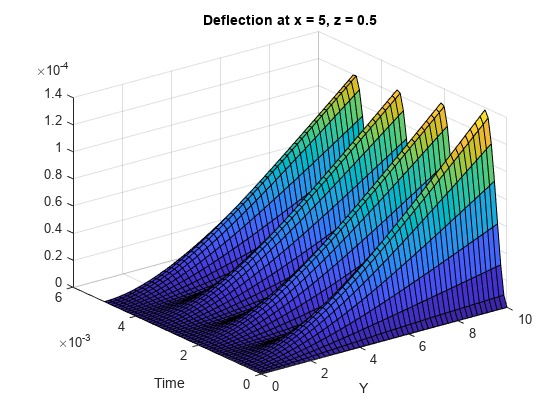
Interpolate the solution at fixed x- and z-coordinates in the centers of their ranges, 5 and 0.5 respectively. Interpolate for y from 0 through 10 in steps of 0.2. Obtain just component 3, the z-component of the solution.
yy = 0:0.2:10;
zz = 0.5*ones(size(yy));
xx = 10*zz;
component = 3;
uintrp = interpolateSolution(results,xx,yy,zz, ...
component,1:length(tlist));The solution is a 51-by-1-by-51 array. Use squeeze to remove the singleton dimension. Removing the singleton dimension transforms this array to a 51-by-51 matrix which simplifies indexing into it.
uintrp = squeeze(uintrp);
Plot the solution as a function of y and time.
[X,Y] = ndgrid(yy,tlist); figure surf(X,Y,uintrp) xlabel("Y") ylabel("Time") title("Deflection at x = 5, z = 0.5") zlim([0,14e-5])
Input Arguments
Output Arguments
Version History
Introduced in R2015b
See Also
PDEModel | StationaryResults | TimeDependentResults | evaluateGradient
Topics
- Static and Animated Plots with Visualize PDE Results Live Editor Task
- Solution Plots with pdeviz
- Solution and Gradient Plots with pdeplot and pdeplot3D
- 2-D Solution and Gradient Plots with MATLAB Functions
- 2-D Slices Through 3-D Geometry with MATLAB Functions
- Contour Slices Through 3-D Solution with MATLAB Functions
- Dimensions of Solutions, Gradients, and Fluxes