evaluateGradient
Evaluate gradients of PDE solutions at arbitrary points
Syntax
Description
[___] = evaluateGradient(
returns the interpolated values of the gradients at the points specified in
results,querypoints)querypoints.
[___] = evaluateGradient(___,
returns the interpolated values of the gradients for the system of equations for
equation indices (components) iU)iU. When solving a system of
elliptic PDEs, specify iU after the input arguments in any
of the previous syntaxes.
The first dimension of gradx, grady,
and, in 3-D case, gradz corresponds to query points. The
second dimension corresponds to equation indices iU.
[___] = evaluateGradient(___,
returns the interpolated values of the gradients for the time-dependent equation
or system of time-dependent equations at times iT)iT. When
evaluating gradient for a time-dependent PDE, specify iT
after the input arguments in any of the previous syntaxes. For a system of
time-dependent equations, specify both time indices iT and
equation indices (components) iU.
The first dimension of gradx, grady,
and, in 3-D case, gradz corresponds to query points. For a
single time-dependent PDE, the second dimension corresponds to time-steps
iT. For a system of time-dependent PDEs, the second
dimension corresponds to equation indices iU, and the third
dimension corresponds to time-steps iT.
Examples
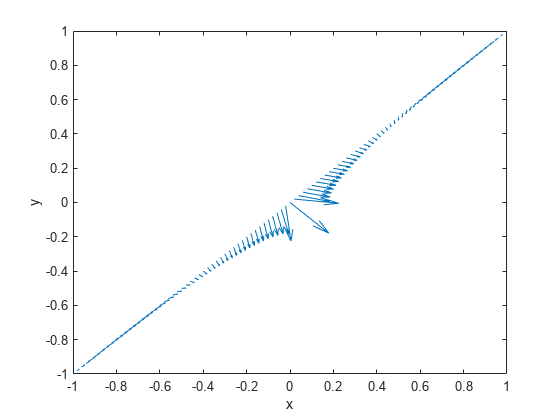
Evaluate gradients of the solution to a scalar elliptic problem along a line. Plot the results.
Create the solution to the problem on the L-shaped membrane with zero Dirichlet boundary conditions.
model = createpde; geometryFromEdges(model,@lshapeg); applyBoundaryCondition(model,"dirichlet", ... "Edge",1:model.Geometry.NumEdges, ... "u",0); specifyCoefficients(model,"m",0,... "d",0,... "c",1,... "a",0,... "f",1); generateMesh(model,"Hmax",0.05); results = solvepde(model);
Evaluate gradients of the solution along the straight line from (x,y)=(-1,-1) to (1,1). Plot the results as a quiver plot by using quiver.
xq = linspace(-1,1,101); yq = xq; [gradx,grady] = evaluateGradient(results,xq,yq); gradx = reshape(gradx,size(xq)); grady = reshape(grady,size(yq)); quiver(xq,yq,gradx,grady) xlabel("x") ylabel("y")
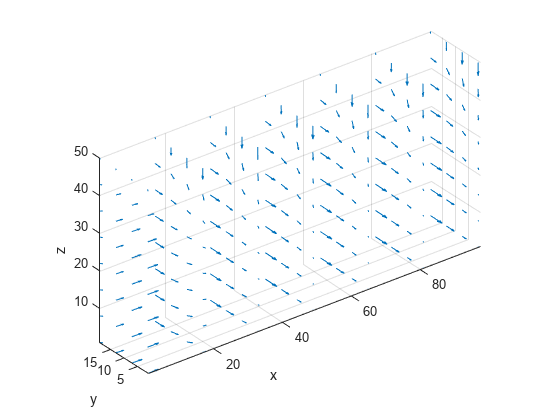
Calculate gradients for the mean exit time of a Brownian particle from a region that contains absorbing (escape) boundaries and reflecting boundaries. Use the Poisson's equation with constant coefficients and 3-D rectangular block geometry to model this problem.
Create the solution for this problem.
model = createpde; importGeometry(model,"Block.stl"); applyBoundaryCondition(model,"dirichlet", ... "Face",[1,2,5], ... "u",0); specifyCoefficients(model,"m",0,... "d",0,... "c",1,... "a",0,... "f",2); generateMesh(model); results = solvepde(model);
Create a grid and interpolate gradients of the solution to the grid.
[X,Y,Z] = meshgrid(1:16:100,1:6:20,1:7:50); [gradx,grady,gradz] = evaluateGradient(results,X,Y,Z);
Reshape the gradients to the shape of the grid and plot the gradients.
gradx = reshape(gradx,size(X)); grady = reshape(grady,size(Y)); gradz = reshape(gradz,size(Z)); quiver3(X,Y,Z,gradx,grady,gradz) axis equal xlabel("x") ylabel("y") zlabel("z")
Solve a scalar elliptic problem and interpolate gradients of the solution to a dense grid. Use a query matrix to specify the grid.
Create the solution to the problem on the L-shaped membrane with zero Dirichlet boundary conditions.
model = createpde; geometryFromEdges(model,@lshapeg); applyBoundaryCondition(model,"dirichlet", ... "Edge",1:model.Geometry.NumEdges, ... "u",0); specifyCoefficients(model,"m",0,... "d",0,... "c",1,... "a",0,... "f",1); generateMesh(model,"Hmax",0.05); results = solvepde(model);
Interpolate gradients of the solution to the grid from -1 to 1 in each direction. Plot the result using the quiver plotting function.
v = linspace(-1,1,101); [X,Y] = meshgrid(v); querypoints = [X(:),Y(:)]'; [gradx,grady] = evaluateGradient(results,querypoints); quiver(X(:),Y(:),gradx,grady) xlabel("x") ylabel("y") axis equal
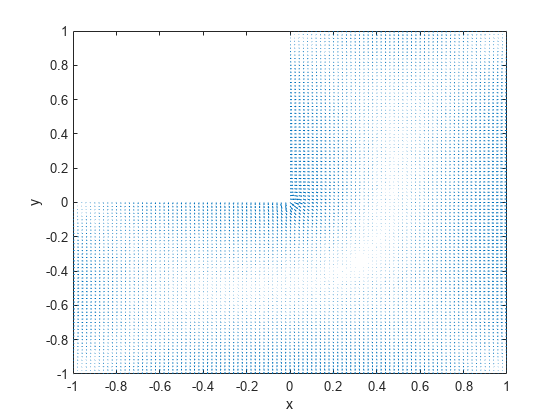
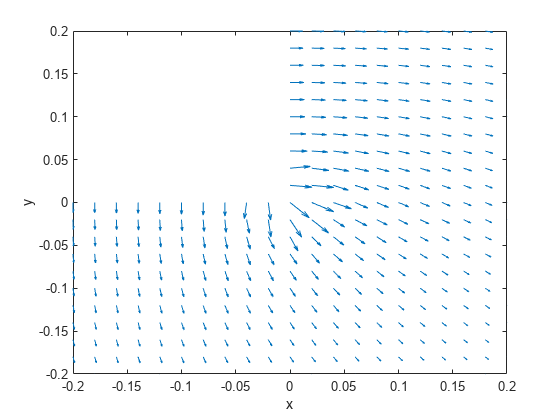
Zoom in on a particular part of the plot to see more details. For example, limit the plotting range to 0.2 in each direction.
xlim([-0.2 0.2]) ylim([-0.2 0.2])
Evaluate gradients of the solution to a two-component elliptic system and plot the results.
Create a PDE model for two components.
model = createpde(2);
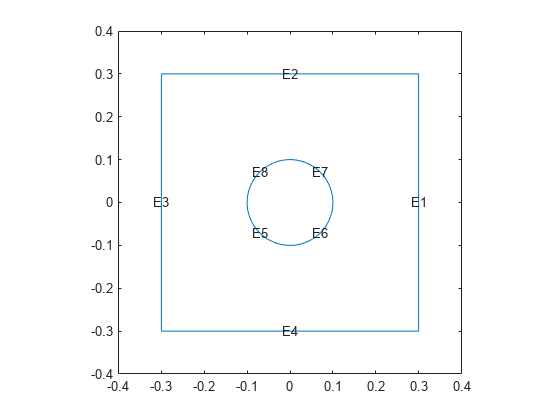
Create the 2-D geometry as a rectangle with a circular hole in its center. For details about creating the geometry, see the example in Solve PDEs with Constant Boundary Conditions.
R1 = [3,4,-0.3,0.3,0.3,-0.3,-0.3,-0.3,0.3,0.3]'; C1 = [1,0,0,0.1]'; C1 = [C1;zeros(length(R1)-length(C1),1)]; geom = [R1,C1]; ns = (char('R1','C1'))'; sf = 'R1 - C1'; g = decsg(geom,sf,ns);
Include the geometry in the model and view the geometry.
geometryFromEdges(model,g); pdegplot(model,"EdgeLabels","on") axis equal axis([-0.4,0.4,-0.4,0.4])
Set the boundary conditions and coefficients.
specifyCoefficients(model,"m",0,... "d",0,... "c",1,... "a",0,... "f",[2; -2]); applyBoundaryCondition(model,"dirichlet", ... "Edge",3,"u",[-1,1]); applyBoundaryCondition(model,"dirichlet", ... "Edge",1,"u",[1,-1]); applyBoundaryCondition(model,"neumann", ... "Edge",[2,4:8],"g",[0,0]);
Create a mesh and solve the problem.
generateMesh(model,"Hmax",0.1);
results = solvepde(model);Interpolate the gradients of the solution to the grid from -0.3 to 0.3 in each direction for each of the two components.
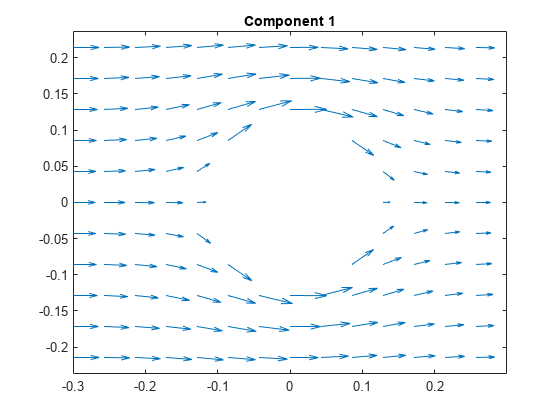
v = linspace(-0.3,0.3,15); [X,Y] = meshgrid(v); [gradx,grady] = evaluateGradient(results,X,Y,[1,2]);
Plot the gradients for the first component.
figure gradx1 = gradx(:,1); grady1 = grady(:,1); quiver(X(:),Y(:),gradx1,grady1) title("Component 1") axis equal xlim([-0.3,0.3])
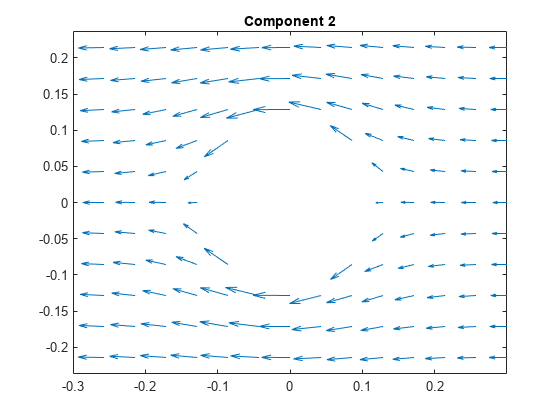
Plot the gradients for the second component.
figure gradx2 = gradx(:,2); grady2 = grady(:,2); quiver(X(:),Y(:),gradx2,grady2) title("Component 2") axis equal xlim([-0.3,0.3])
Solve a system of hyperbolic PDEs and evaluate gradients.
Import slab geometry for a 3-D problem with three solution components. Plot the geometry.
model = createpde(3); importGeometry(model,"Plate10x10x1.stl"); pdegplot(model,"FaceLabels","on","FaceAlpha",0.5)
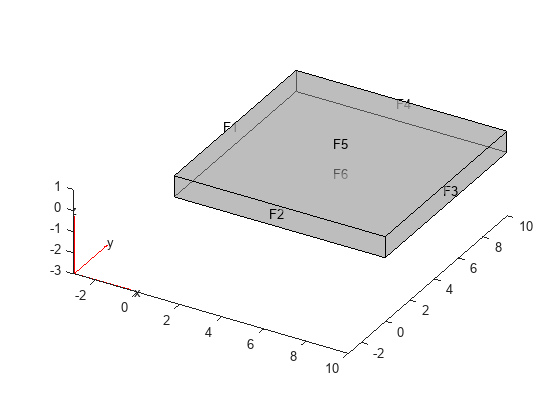
Set boundary conditions such that face 2 is fixed (zero deflection in any direction) and face 5 has a load of 1e3 in the positive z-direction. This load causes the slab to bend upward. Set the initial condition that the solution is zero, and its derivative with respect to time is also zero.
applyBoundaryCondition(model,"dirichlet","Face",2,"u",[0,0,0]); applyBoundaryCondition(model,"neumann","Face",5,"g",[0,0,1e3]); setInitialConditions(model,0,0);
Create PDE coefficients for the equations of linear elasticity. Set the material properties to be similar to those of steel. See Linear Elasticity Equations.
E = 200e9; nu = 0.3; specifyCoefficients(model,"m",1,... "d",0,... "c",elasticityC3D(E,nu),... "a",0,... "f",[0;0;0]);
Generate a mesh, setting Hmax to 1.
generateMesh(model,"Hmax",1);Solve the problem for times 0 through 5e-3 in steps of 1e-4. You might have to wait a few minutes for the solution.
tlist = 0:5e-4:5e-3; results = solvepde(model,tlist);
Evaluate the gradients of the solution at fixed x- and z-coordinates in the centers of their ranges, 5 and 0.5 respectively. Evaluate for y from 0 through 10 in steps of 0.2. Obtain just component 3, the z-component.
yy = 0:0.2:10;
zz = 0.5*ones(size(yy));
xx = 10*zz;
component = 3;
[gradx,grady,gradz] = evaluateGradient(results,xx,yy,zz, ...
component,1:length(tlist));The three projections of the gradients of the solution are 51-by-1-by-51 arrays. Use squeeze to remove the singleton dimension. Removing the singleton dimension transforms these arrays to 51-by-51 matrices which simplifies indexing into them.
gradx = squeeze(gradx); grady = squeeze(grady); gradz = squeeze(gradz);
Plot the interpolated gradient component grady along the y axis for the following six values from the time interval tlist.
figure t = [1:2:11]; for i = t p(i) = plot(yy,grady(:,i),"DisplayName", ... strcat("t=",num2str(tlist(i)))); hold on end legend(p(t)) xlabel("y") ylabel("grady") ylim([-5e-6, 20e-6])

Input Arguments
Output Arguments
Tips
The results object contains the solution and its gradient
calculated at the nodal points of the triangular or tetrahedral mesh. You can access the
solution and three components of the gradient at nodal points by using dot
notation.
interpolateSolution and evaluateGradient let
you interpolate the solution and its gradient to a custom grid, for example, specified
by meshgrid.
Version History
Introduced in R2016a
See Also
PDEModel | StationaryResults | TimeDependentResults | interpolateSolution | evaluateCGradient | quiver | quiver3 | contour