将场景与 MATLAB 和 Simulink 集成
您可以将 RoadRunner 场景与 MATLAB 和 Simulink 集成,以提供在虚拟环境中开发和测试自动驾驶算法的工作流程。通过这种集成,您可以在 RoadRunner 中创建详细、逼真的场景,并在 MATLAB 和 Simulink 中使用它们进行算法开发和测试。
自动驾驶工作流程涵盖了从数据导入和转换到分析、仿真和可视化的整个过程。您可以创建 RoadRunner 场景并将其导出为与 Simulink 兼容的文件格式,以进行情境仿真。然后,您可以使用这些场景在包含车辆、传感器和天气条件的动态情境环境中测试您的驾驶算法。
您可以将 MATLAB 和 Simulink 与自动驾驶工作流程的以下不同阶段的场景集成
场景导入与导出:
您可以使用图形界面和包含三维模型和素材的 RoadRunner Asset Library 从头开始设计 RoadRunner 中的场景。您还可以导入各种格式的数据,例如 ASAM OpenDRIVE® 和 Zenrin SD Maps。如果您正在使用像 Here 或 TomTom 这样的高清地图数据或您自己的自定义格式,您可以使用 RoadRunner Scene Builder 将这些地图导入 RoadRunner
RoadRunner 还提供 MATLAB 函数,用于执行常见的工作流任务,例如打开、关闭和保存场景和工程以及导入和导出场景。
您在 RoadRunner 中创建的场景可以导出为 ASAM OpenDRIVE 和 Filmbox 等文件格式,这些格式与 MATLAB 和 Simulink 兼容。
自动化:一旦将 RoadRunner 场景与 MATLAB 集成,您就可以使用 MATLAB 脚本自动执行重复性任务,例如批量导出、运行仿真或基于 RoadRunner 数据更新模型。
算法设计与分析:使用 MATLAB 和 Simulink,您可以仿真驾驶应用程序来模仿现实世界的行为,例如自适应巡航控制、紧急制动、变车道、排队行驶和停车。这些行为的仿真结果可以影响 RoadRunner 中的后续仿真或模型调整,从而创建具有高保真算法的迭代过程。
因此,使用此集成工作流程,您可以自动化数据处理,减少手动工作量和发生错误的可能性。随着工程的发展,您的算法可以轻松适应处理更大的数据集或更复杂的仿真。这也意味着流程是一致的,并且可以针对不同的数据集或工程进行复制。
MATLAB 对象和函数
模块
| RoadRunner Scenario | Define interface for Simulink actor model (自 R2022a 起) |
| RoadRunner Scenario Reader | Reads selected topic from RoadRunner scenario (自 R2022a 起) |
| RoadRunner Scenario Writer | Write selected topic to RoadRunner scenario (自 R2022a 起) |
主题
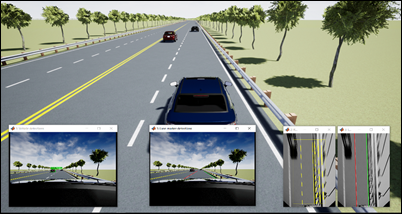
- Highway Lane Following with RoadRunner Scene (Automated Driving Toolbox)
Simulate a highway lane following application using a scene created in the RoadRunner 3D scene editing tool.
- Create and Use an Oval Track (Vehicle Dynamics Blockset)
Create an oval track with RoadRunner and use it in a Vehicle Dynamics Blockset™ simulation that co-simulates with Unreal®.
- Connect MATLAB and RoadRunner to Control and Analyze Simulations (Automated Driving Toolbox)
Use MATLAB with RoadRunner to control simulations programmatically and model actors in MATLAB or Simulink.
- Overview of Simulating RoadRunner Scenarios with MATLAB and Simulink (Automated Driving Toolbox)
This topic describes workflows to create actor behaviors in MATLAB or Simulink, associate the behaviors with graphical actors in RoadRunner Scenario, start the scenario simulation in RoadRunner, and log simulation results for further analysis.
- Export Driving Scenario to RoadRunner Scenario Simulation (Automated Driving Toolbox)
Export a driving scenario to RoadRunner scenario and launch RoadRunner using the
startRoadRunnerForScenariofunction or the Driving Scenario Designer app. - Import RoadRunner Scene into Unreal Engine Using Simulink (Automated Driving Toolbox)
Import a scene built in RoadRunner into an Unreal Engine simulation in Simulink to generate vision detections and ground-truth semantic segmentation labels for the scene.
精选示例
使用 MATLAB 导出多个场景
使用 MATLAB 函数将工程中的所有 RoadRunner 场景导出为支持的格式。
使用 MATLAB 函数在格式之间转换场景
在 RoadRunner 工程中导入多个场景,并使用 MATLAB 函数将其导出为支持的格式。
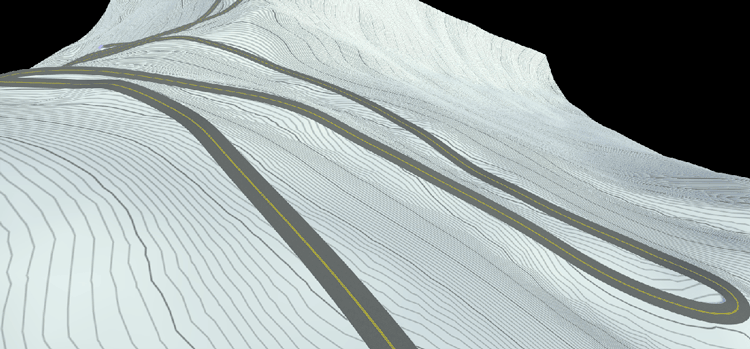
Build Pikes Peak RoadRunner 3D Scene Using RoadRunner HD Map
Build RoadRunner 3D scene for Pikes Peak, Colorado using MATLAB functions.