ctf2zp
Description
[
computes the zeros z,p] = ctf2zp(B,A)z and poles p of a system
represented as Cascaded Transfer Functions (CTF) with numerator coefficients B and denominator coefficients
A.
Examples
Specify a two-section digital filter with a transfer function in the CTF format. Plot the 1024-point frequency response of the filter.
B = [0.1607 0.2414 0.4689
0.1607 0.0828 0.0551];
A = [ 1 0 0;
1 -1.1940 0.4360];
freqz(B,A,1024,"ctf")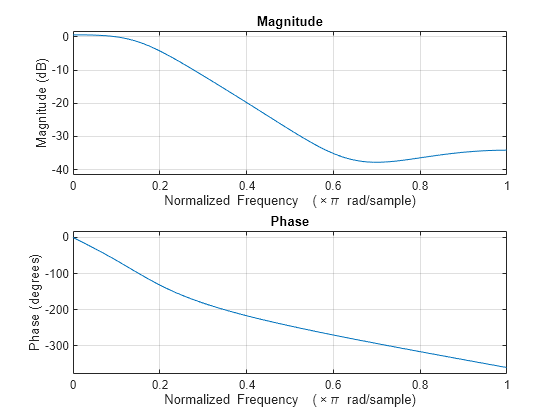
Compute the zeros and poles of the transfer function.
[z,p] = ctf2zp(B,A)
z = 4×1 complex
-0.7511 + 1.5342i
-0.7511 - 1.5342i
-0.2576 + 0.5258i
-0.2576 - 0.5258i
p = 4×1 complex
0.0000 + 0.0000i
0.0000 + 0.0000i
0.5970 + 0.2821i
0.5970 - 0.2821i
Create a 10th-order bandpass digital elliptic filter in the CTF form.
[B,A,gS] = ellip(10,0.1,60,[0.35 0.65],"ctf")B = 5×5
1.0000 -0.0000 -1.3205 0.0000 1.0000
1.0000 -0.0000 0.3308 -0.0000 1.0000
1.0000 -0.0000 0.8670 0.0000 1.0000
1.0000 -0.0000 1.0340 0.0000 1.0000
1.0000 0.0000 1.0853 -0.0000 1.0000
A = 5×5
1.0000 -0.0000 1.2677 -0.0000 0.4407
1.0000 0.0000 1.2212 0.0000 0.6374
1.0000 -0.0000 1.1779 -0.0000 0.8251
1.0000 0.0000 1.1571 0.0000 0.9300
1.0000 -0.0000 1.1561 -0.0000 0.9818
gS = 0.0053
Specify scale values. Because the filter has five fourth-order sections, the vector of scale values must have six elements.
g = [1:size(B,1) gS]
g = 1×6
1.0000 2.0000 3.0000 4.0000 5.0000 0.0053
Get the zero-pole decomposition of the filter. Plot the zeros and poles in the z-plane.
[z,p,k] = ctf2zp(B,A,g);
zplane(z,p)
title("Pole-Zero Plot, k = "+k)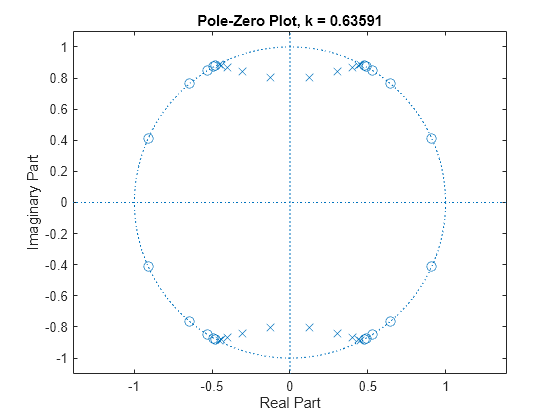
Input Arguments
Output Arguments
More About
Tips
You can obtain filters in
CTF format, including the scaling gain. Use the outputs of digital IIR filter design functions,
such as butter, cheby1, cheby2, and ellip. Specify the "ctf" filter-type argument in these
functions and specify to return B, A, and
g to get the scale values. (since R2024b)
References
[1] Lyons, Richard G. Understanding Digital Signal Processing. Upper Saddle River, NJ: Prentice Hall, 2004.
Extended Capabilities
Version History
Introduced in R2024b