机械系统
浏览关于机械系统建模、控制和仿真的示例。
精选示例

带有控制器的质量-弹簧-阻尼器系统
此示例展示了一个受控的质量-弹簧-阻尼器系统。控制器调整物体上的力,使物体的位置跟踪命令信号。物体的初始速度为每秒 10 米。控制器会调整力源施加的力来跟踪输入信号的阶跃变化。

Simulink 和 Simscape 中的质量-弹簧-阻尼器系统
此示例将使用 Simscape™ 模块和物理连接的质量-弹簧-阻尼器系统模型与使用 Simulink® 模块和信号的模型进行比较。
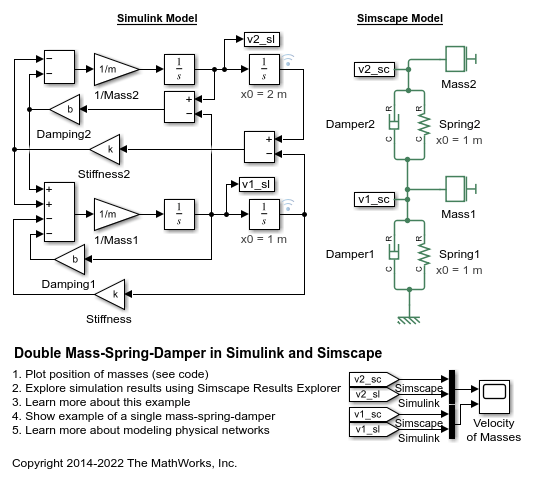
Simulink 和 Simscape 中的双质量-弹簧-阻尼器系统
此示例展示了两个双质量-弹簧-阻尼器系统模型,一个使用 Simulink® 输入/输出模块,一个使用 Simscape™ 物理网络。

简单机械系统
此示例展示了连接旋转和平移运动的系统模型。一个叠加杠杆驱动一个负载,负载由一个质量体、粘性摩擦和一个弹簧组成,弹簧连接到叠加杠杆上的关节 C。关节 B 悬挂在两根旋转弹簧上,弹簧通过一个轮轴和一个齿轮箱与参考点相连。关节 A 通过一个齿轮箱和一个轮轴机构连接到扭矩源。

具有平移摩擦的机械系统
此示例展示了一个与一根弹簧和一个粘性阻尼器连接在一起的质量体。该质量体由理想的速度源通过摩擦元件驱动。关于速度源的运动轨迹,选择了绘制质量体位移相对速度源位移时能产生典型滞后曲线的运动轨迹。

具有平移硬限位的机械系统
此示例展示了由一个硬限位连接的两个质量体。质量体 1 由理想的速度源驱动。当速度输入改变方向时,质量体 2 将保持静止,直到质量体 1 到达由平移硬限位建模的行程的另一端。绘制质量体 2 相对质量体 1 的位移图,会产生典型的滞后曲线。
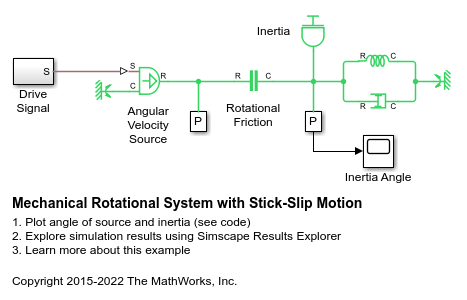
具有粘滑运动的机械旋转系统
该模型显示了一个具有粘滑摩擦的机械旋转系统。一个惯性体通过弹簧和阻尼器连接到一个固定点。惯性体由速度源通过一个粘滑摩擦元件驱动。由于摩擦元件的起动摩擦和库仑摩擦存在差异,导致惯性体出现粘滑运动。

联动机构
此示例展示了 Simscape™ Lever 模块在连杆机构中的使用。杠杆 1 和杠杆 4 是支点在末端的一级杠杆。杠杆 3 是支点在中间的二级杠杆。杠杆 2 是由杠杆 1 和杠杆 3 驱动的叠加杠杆。
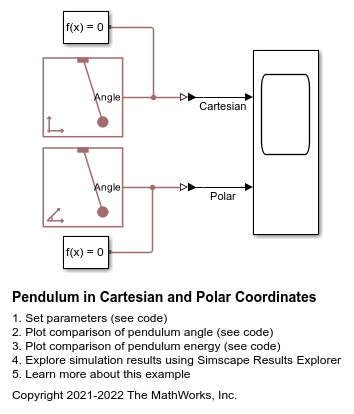
笛卡尔坐标和极坐标中的摆
此示例展示了平面摆的两种不同实现。

使用碰撞质量体计算 Pi
此示例使用一个大家熟知的物理问题,通过捕捉在一秒内发生的数万个瞬时事件来展示求解器的性能。在一维路径上,一个大质量物体朝着一个小质量物体运动,小质量物体另一侧有一堵墙。当大质量物体撞击小质量物体时,小质量物体从墙上反弹回来并改变方向朝着大质量物体运动。每次碰撞都是完全弹性的。随着大质量物体离墙越来越近,与小质量物体的碰撞也越来越频繁,直到大质量物体改变方向,最终以足够快的速度朝着反方向运动,以至于小物体永远也赶不上它。