控制设计
要设计和分析在 Simulink 环境中建模的控制系统,请考虑使用 Simulink Control Design 软件。
Simulink Control Design 扩展 Simulink,使您能够找到各个工作点,并计算 Simulink 模型在不同工况下的精确线性化。Simulink Control Design 提供工具让您计算基于仿真的频率响应而无需修改模型。
Simulink Control Design 提供了几种调节 Simulink 模块(例如 Transfer Function 和 PID Controller 模块)的方法。您可以使用这些方法和工具来:
自动调节包含 PID Controller 或 PID Controller (2DOF) 模块的反馈环。
以图形方式或自动方式调节包含任何可调 Simulink 模块的 SISO 反馈环路。
调节具有任何结构的控制系统的 Simulink 模型,以满足高级设计目标,如参考跟踪、抗扰和稳定裕度。
主题
配平和线性化
- Compute Steady-State Operating Points (Simulink Control Design)
To obtain a steady-state operating point, you can trim your model using numerical optimization techniques or simulate your model until it reaches a steady-state condition. - 线性化非线性模型 (Simulink Control Design)
获取非线性系统的线性逼近,该逼近在工作点周围的小区域内有效。 - 选择线性化工具 (Simulink Control Design)
借助 Simulink Control Design 软件,您可以使用用户界面、函数或模块对非线性模型执行线性分析。 - 在模型工作点处线性化 Simulink 模型 (Simulink Control Design)
在由初始状态值和输入信号组成的工作点处线性化模型。 - 在配平工作点处进行线性化 (Simulink Control Design)
您可以在满足指定输入、输出或状态约束的工作点处线性化 Simulink 模型。
频率响应估计
- 频率响应估计基础知识 (Simulink Control Design)
频率响应描述系统对正弦输入的稳态响应。使用 Simulink Control Design,您可以估计模型的频率响应或执行物理被控对象的在线估计。 - 使用模型线性化器估计频率响应 (Simulink Control Design)
使用手动构造的正弦流输入信号估计 Simulink 模型的频率响应。
PID 控制设计
- Simulink 中基于模型的 PID 调节简介 (Simulink Control Design)
在包含 PID Controller 或 PID Controller (2DOF) 模块的 Simulink 模型中,使用 PID 调节器对 PID 增益进行交互式调节。 - PID Autotuning for a Plant Modeled in Simulink (Simulink Control Design)
Use the PID autotuning algorithm to tune against a plant modeled in Simulink while the model is running.
控制系统调节
- Tune Control Systems in Simulink (Simulink Control Design)
At the command line, usesystuneorlooptuneto automatically tune control systems modeled in Simulink.
自适应控制设计
控制设计应用
- Thermal Modeling and Control Design for CPU Chip Cooling System (Control System Toolbox)
Create a CPU and heat sink thermal model, perform model order reduction, and design a controller for a cooling system.
- Create Heat Sink Finite Element Model and Export Data for State-Space Simulation (Control System Toolbox)
- Import Finite Element Model Data to Simulink (Control System Toolbox)
- Create Low-Order LPV Model of CPU and Heat Sink Model (Control System Toolbox)
- Tune PI Controller for Heat Sink Model (Control System Toolbox)
精选示例
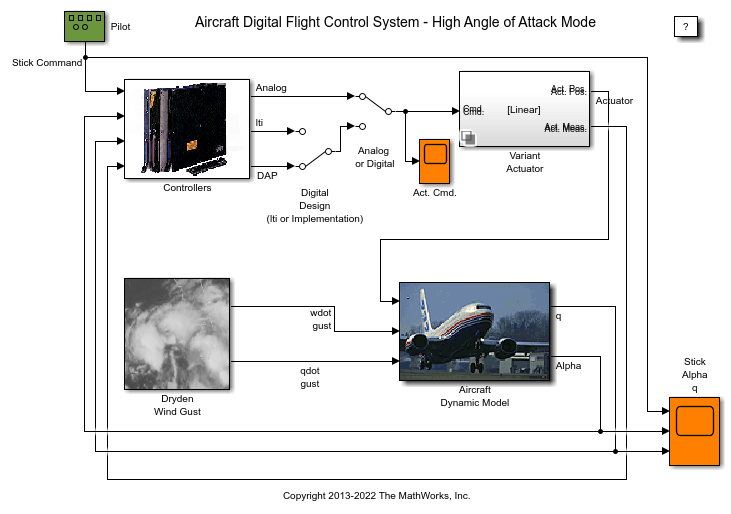
Designing a High Angle of Attack Pitch Mode Control
Use Control System Toolbox™, Simulink® Control Design™ and Aerospace Blockset™ to design a flight control system for the longitudinal motion of aircraft. You develop a controller that enables stable operation at high angles of attack with minimal pilot workload.
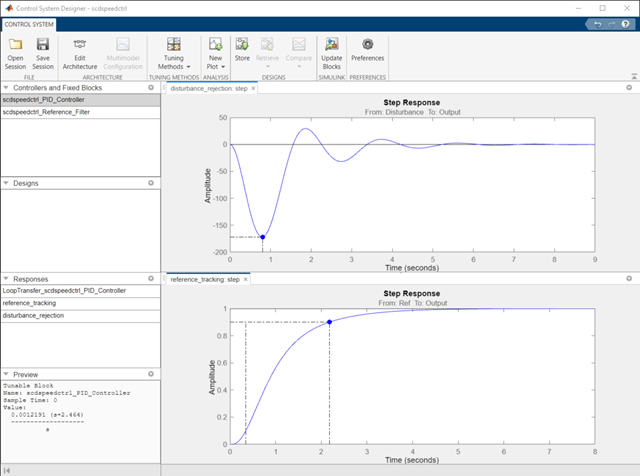
Single Loop Feedback/Prefilter Compensator Design
Tune the closed-loop performance of a single-loop system using a feedback compensator, and then tune the system response to changes in the reference signal using a prefilter.
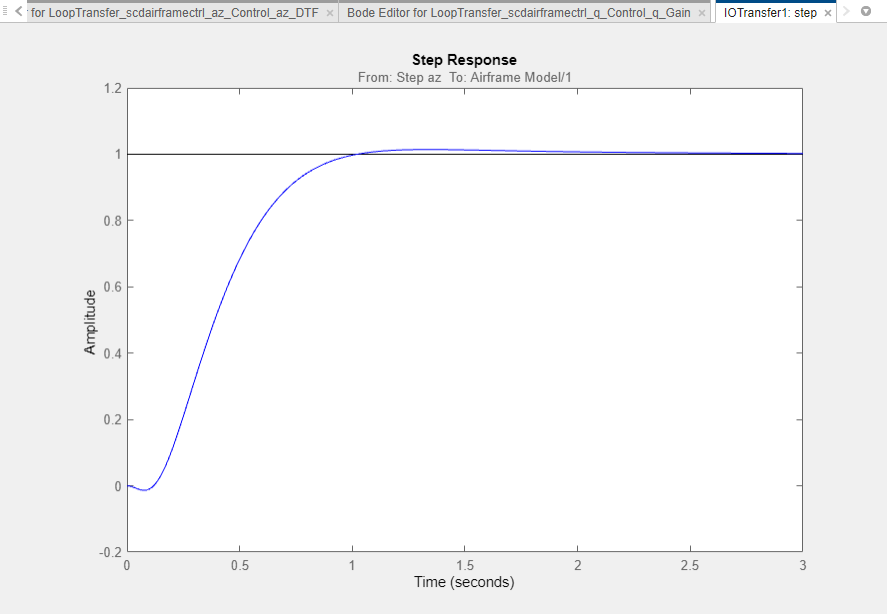
Cascaded Multiloop Feedback Design
To design compensators for cascaded multi-loop systems, first tune the compensator for the inner loop and then tune the outer-loop compensator.

Tune a Control System Using Control System Tuner
Use the Control System Tuner app to tune a MIMO, multiloop control system modeled in Simulink.
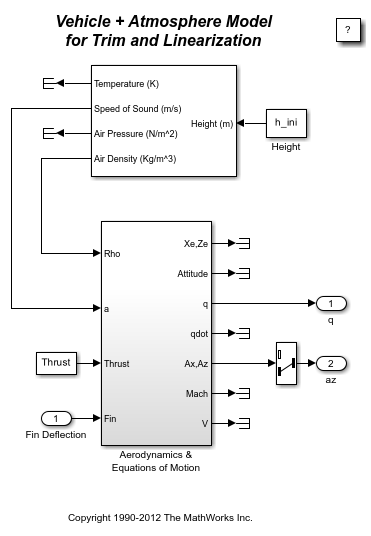
弹体配平和线性化
此示例说明如何使用 Simulink® Control Design™ 来配平和线性化弹体。
教学资源

用于控制的虚拟硬件和实验
学习构建开/闭环反馈控制系统、计算传递函数和执行位置分析的概念。