Discrete Filter
构建无限冲激响应 (IIR) 滤波器模型
库:
Simulink /
Discrete
DSP System Toolbox /
Filtering /
Filter Implementations
描述
Discrete Filter 模块使用指定的数字 IIR 滤波器单独对输入信号的每个通道进行滤波。您可以将滤波器结构指定为 Direct form I、Direct form I transposed、Direct form II 或 Direct form II transposed。该模块实现了具有固定系数的静态滤波器。您可以调整这些静态滤波器的系数。
此模块随时间的推移单独对输入信号的每个通道进行滤波。输入处理参数用于指定该模块如何处理输入的每个元素。您可以指定将输入元素作为独立通道处理(基于采样的处理),或将输入的每个列作为独立通道处理(基于帧的处理)。要执行基于帧的处理,您必须拥有 DSP System Toolbox™ 许可证。
输出维度等于输入维度,但为分子系数参数指定滤波器抽头矩阵时除外。当您执行此操作时,输出维度取决于您指定的不同滤波器抽头集的数量。
使用分子系数参数可以指定离散滤波器分子多项式的系数。使用分母系数参数可以指定函数的分母多项式的系数。分母系数参数必须为系数向量。
按 z-1 的升幂顺序指定分子和分母多项式的系数。Discrete Filter 模块允许使用 z-1(延迟算子)形式的多项式来表示离散系统。信号处理工程师通常使用这种方法。反之,Discrete Transfer Fcn 模块允许使用 z 形式的多项式来表示离散系统。控制工程师通常使用这种方法。当分子和分母多项式的长度相同时,两种方法相同。
指定初始状态
在对话框参数和输入端口模式下,该模块默认将内部滤波器状态初始化为零,这等效于假定过去的输入和输出为零。您可以选择使用初始状态参数为滤波器延迟指定非零初始状态。
要确定您必须指定的初始状态值数量以及如何指定这些状态值,请参阅下面的有关有效初始状态和延迟元素数(滤波器状态)的表。初始状态参数可采用下表所述的四种形式之一。
有效初始状态
| 初始状态 | 示例 | 描述 |
|---|---|---|
| 标量 |
每个通道的每个延迟元素均设置为 | 模块将滤波器中的所有延迟元素初始化为标量值。 |
| 向量 | 用于具有两个延迟元素的滤波器:[d1 d2] 所有通道的延迟元素均为 d1 和 d2。 | 每个向量元素均为相应的延迟元素指定一个唯一的初始条件。模块将相同的初始条件向量应用于输入信号的每个通道。向量长度必须等于滤波器中的延迟元素数(在表延迟元素数(滤波器状态)中指定)。 |
| 向量或矩阵 | 对于三通道输入信号和具有两个延迟元素的滤波器: [d1 d2 D1 D2 d1 d2] 或
| 每个向量或矩阵元素均为相应通道中的相应延迟元素指定唯一的初始条件:
|
每输入通道的延迟元素数取决于滤波器结构,如下表所示。
延迟元素数(滤波器状态)
| 滤波器结构 | 每通道的延迟元素数 |
|---|---|
| 直接 I 型 |
|
| 直接 II 型 |
|
下表根据您将输入处理参数设置为基于帧还是基于采样,分两种情况说明采用不同输入大小和不同通道数时的有效初始状态。
基于帧的处理
| 输入 | 通道数 | 有效初始状态(对话框) | 有效初始状态(输入端口) |
|---|---|---|---|
| 1 |
|
|
| N |
|
|
基于采样的处理
| 输入 | 通道数 | 有效初始状态(对话框) | 有效初始状态(输入端口) |
|---|---|---|---|
| 1 |
|
|
| N |
|
|
| K×N |
|
|
当初始状态为标量时,模块将所有滤波器状态初始化为相同的标量值。输入 0 可将所有状态初始化为零。当初始状态为向量或矩阵时,每个向量或矩阵元素都指定一个唯一的初始状态。此唯一状态对应于相应通道中的一个延迟元素:
向量长度必须等于滤波器中的延迟元素数,
M = max(number of zeros, number of poles)。矩阵的行数必须与滤波器中的延迟元素数相同,
M = max(number of zeros, number of poles)。矩阵的每一列还须对应输入信号的一个通道。
初始滤波器输出 y1、初始输入 u1 和初始状态 [x1, x2] 之间的关系如以下方程所示。
其中
b1、b2 和 b3 是离散滤波器的分子系数。
a1、a2 和 a3 是离散滤波器的分母系数。
示例
此示例说明如何为 Discrete Filter 模块指定由非零初始条件组成的向量。
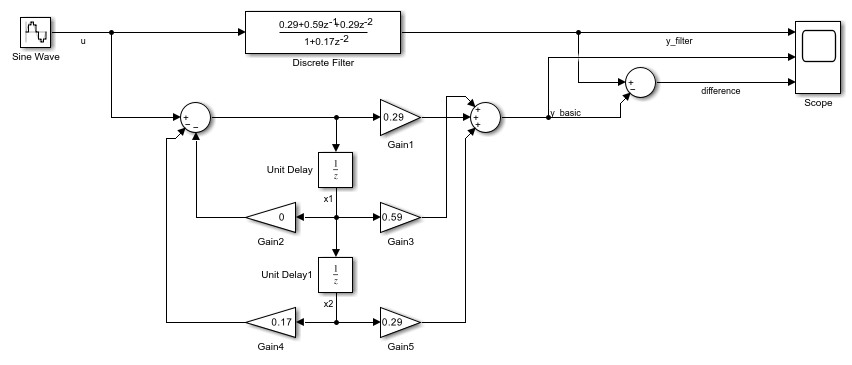

示波器显示,当 Discrete Filter 模块的初始状态设置为 [1 2] 时,由 Discrete Filter 模块滤波后的信号与来自滤波器的构建块的信号之间的差值为零。这说明您可以将 Discrete Filter 模块的初始条件作为向量 [1 2] 来输入。为了获得相同的结果,您也可以将 Unit Delay 的初始条件设置为 1,并将 Unit Delay1 设置为 2。
扩展示例
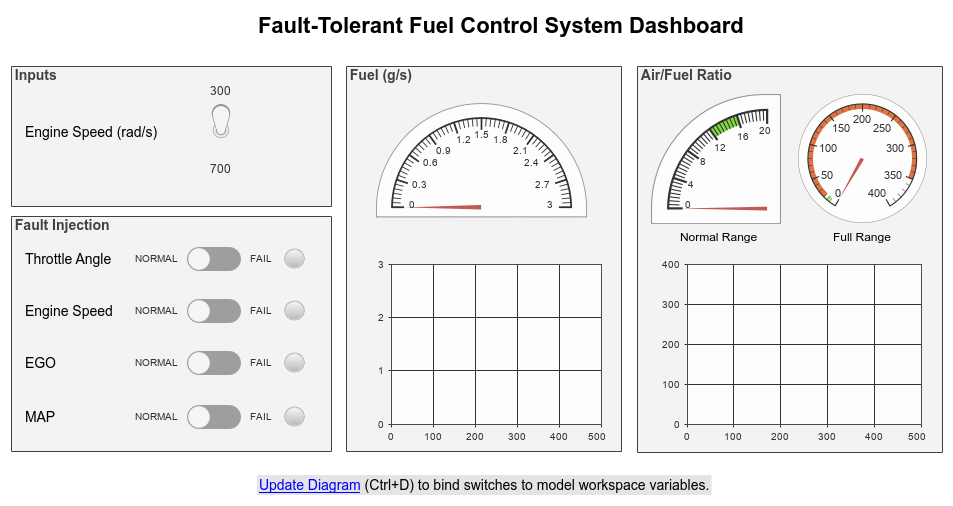
容错燃油控制系统建模
此示例说明如何结合使用 Stateflow® 和 Simulink® 的功能来进行混合系统建模。这种类型的建模对于具有基于离散事件的多种可能运行模式的系统特别有用。传统的信号流在 Simulink 中处理,而控制配置的更改在 Stateflow 中实现。此示例中所述的模型表示一个汽油发动机的燃油控制系统。该系统具有稳健性,因为它可以检测到单个传感器的故障,并且可以动态重新配置控制系统以实现不间断运行。
端口
输入
输出
参数
常设
指定离散 IIR 滤波器结构。
依赖关系
要使用直接 II 型以外的任何滤波器结构,您必须具有可用的 DSP System Toolbox 许可证。
编程用法
模块参数:FilterStructure |
| 类型:字符向量 |
值:'Direct form II' | 'Direct form I transposed' | 'Direct form I' | 'Direct form II transposed' |
默认值:'Direct form II'
|
将分子系数的信源指定为对话框或输入端口。
编程用法
模块参数:NumeratorSource |
| 类型:字符向量 |
值:'Dialog' | 'Input port' |
默认值:'Dialog'
|
将离散滤波器的分子系数指定为 z 的降幂。使用行向量可指定单个分子多项式的系数。要指定多个滤波器的系数,请指定系数矩阵,其中每行表示一组不同滤波器抽头。要实现多个滤波器,滤波器结构必须为直接 II 型,输入处理必须为元素作为通道(基于采样),并且输入必须为标量。
依赖关系
要启用此参数,请将分子源设置为对话框。
编程用法
模块参数:Numerator |
| 类型:字符向量 |
| 值:标量 | 向量 | 矩阵 |
默认值:'[1]'
|
将分母系数的信源指定为对话框或输入端口。
要将分母源设置为输入端口,请选择通过跳过除以分母首项系数(a0)进行优化参数。
编程用法
模块参数:DenominatorSource |
| 类型:字符向量 |
值:'Dialog' | 'Input port' |
默认值:'Dialog'
|
将离散滤波器的分母系数指定为 z 的降幂。使用行向量可指定单个分母多项式的系数。
当您选择通过跳过除以分母首项系数(a0)进行优化参数时,如果您在模块对话框中指定分母系数且 a0 ≠ 1,则会发生错误。
依赖关系
要启用此参数,请将分母源设置为对话框。
编程用法
模块参数:Denominator |
| 类型:字符向量 |
| 值:标量 | 向量 |
默认值:'[1 0.5]'
|
将初始状态的信源指定为对话框或输入端口。
编程用法
模块参数:InitialStatesSource |
| 类型:字符向量 |
值:'Dialog' | 'Input port' |
默认值:'Dialog'
|
编程用法
模块参数:InitialStates |
| 类型:字符向量 |
| 值:标量 | 向量 | 矩阵 |
默认值:'0'
|
此外,还可以使用 IC。
编程用法
模块参数:InitialStates |
| 类型:字符向量 |
| 值:标量 | 向量 | 矩阵 |
默认值:'0'
|
编程用法
模块参数:InitialDenominatorStates |
| 类型:字符向量 |
| 值:标量 | 向量 | 矩阵 |
默认值:'0'
|
指定用于将状态重置为初始条件的触发事件。
| 重置模式 | 行为 |
|---|---|
| 无 | 不重置。 |
| 上升沿 | 基于上升沿重置。 |
| 下降沿 | 基于下降沿重置。 |
| 任一沿 | 基于上升或下降沿重置。 |
| 电平 | 在下列任一情况下重置:
|
| 电平保持 | 当重置信号在当前时间步为非零值时重置 |
编程用法
模块参数:ExternalReset |
| 类型:字符向量 |
值:'None' | 'Rising' | 'Falling' | 'Either' | 'Level' | 'Level hold' |
默认值:'None' |
指定模块是执行基于采样还是基于帧的处理。
元素作为通道(基于采样) - 将输入的每个元素作为独立通道处理。
列作为通道(基于帧) - 将输入的每列作为独立通道处理。
依赖关系
基于帧的处理需要具有 DSP System Toolbox 许可证。
有关详细信息,请参阅Sample- and Frame-Based Concepts (DSP System Toolbox)。
编程用法
模块参数:InputProcessing |
| 类型:字符向量 |
值:'Columns as channels (frame based)' | 'Elements as channels (sample based)' |
默认值:'Elements as channels (sample based)' |
当选中此复选框时,该模块在仿真或生成的代码中不会除以 a0。此参数可以优化您的代码。如果在“模块”对话框中指定分母系数并且 a0≠1,则会出错。
如果从输入端口分母指定分母系数,则您必须选择通过跳过除以分母首项系数(a0)进行优化参数。选中此复选框时,模块会忽略分母首项系数 a0 并用 1 替换它。
当清除此复选框时,该模块在仿真期间完全可调。它在仿真和代码生成中均除以 a0。
编程用法
模块参数:a0EqualsOne
|
| 类型:字符向量 |
值:'off' | 'on' |
默认值:'off'
|
点击此按钮以打开滤波器可视化工具 (fvtool (DSP System Toolbox)),并显示在模块对话框中定义的滤波器的滤波器响应。
依赖关系
要启用此参数,请将分子源和分母源参数设置为对话框。
仅当您有有效的 DSP System Toolbox 许可证时,此参数才会出现。
数据类型
指定状态数据类型。您可以将此参数设置为:
继承数据类型的规则,例如继承: 与输入相同
内置整数,例如
int8数据类型对象,例如
Simulink.NumericType对象计算结果为数据类型的表达式,例如
fixdt(1,16,0)
数据类型助手可帮助您设置数据属性。要使用数据类型助手,请点击  。有关详细信息,请参阅使用数据类型助手指定数据类型。
。有关详细信息,请参阅使用数据类型助手指定数据类型。
编程用法
模块参数:StateDataTypeStr |
| 类型:字符向量 |
值:'Inherit: Same as input' | 'int8' | 'int16' | 'int32' | 'int64' | 'fixdt(1,16,0)' | '<data type expression>' |
默认值:'Inherit: Same as input' |
指定分子系数数据类型。您可以将此参数设置为:
继承数据类型的规则,例如继承: 从内部规则继承
内置有符号整数,例如
int8数据类型对象,例如
Simulink.NumericType对象计算结果为数据类型的表达式,例如
fixdt(1,16,0)
数据类型助手可帮助您设置数据属性。要使用数据类型助手,请点击 。有关详细信息,请参阅使用数据类型助手指定数据类型。
编程用法
模块参数:NumCoefDataTypeStr |
| 类型:字符向量 |
值:'Inherit: Inherit via internal rule' | 'int8' | 'int16' | 'int32' | 'int64' | 'fixdt(1,16)' | 'fixdt(1,16,0)' | '<data type expression>' |
默认值:'Inherit: Inherit via internal rule' |
指定分子系数可以具有的最小值。默认值为 [](未指定)。Simulink® 软件使用此值执行:
参数范围检查(请参阅指定模块参数的最小值和最大值)
定点数据类型的自动定标
编程用法
模块参数:NumCoefMin |
| 类型:字符向量 |
| 值:标量 |
默认值:'[]' |
指定分子系数可以具有的最大值。默认值为 [](未指定)。Simulink 软件使用此值执行:
参数范围检查(请参阅指定模块参数的最小值和最大值)
定点数据类型的自动定标
编程用法
模块参数:NumCoefMax |
| 类型:字符向量 |
| 值:标量 |
默认值:'[]' |
指定分子系数的乘积输出数据类型。您可以将此参数设置为:
继承数据类型的规则,例如继承: 从内部规则继承
内置数据类型,例如
int8数据类型对象,例如
Simulink.NumericType对象计算结果为数据类型的表达式,例如
fixdt(1,16,0)
数据类型助手可帮助您设置数据属性。要使用数据类型助手,请点击 。有关详细信息,请参阅使用数据类型助手指定数据类型。
编程用法
模块参数:NumProductDataTypeStr |
| 类型:字符向量 |
值:'Inherit: Inherit via internal rule' | 'Inherit: Same as input' | 'int8' | 'int16' | 'int32' | 'int64' | 'fixdt(1,16,0)' | '<data type expression>' |
默认值:'Inherit: Inherit via internal rule' |
指定分子系数的累加器数据类型。您可以将此参数设置为:
继承数据类型的规则,例如继承: 从内部规则继承
内置数据类型,例如
int8数据类型对象,例如
Simulink.NumericType对象计算结果为数据类型的表达式,例如
fixdt(1,16,0)
数据类型助手可帮助您设置数据属性。要使用数据类型助手,请点击 。有关详细信息,请参阅使用数据类型助手指定数据类型。
编程用法
模块参数:NumAccumDataTypeStr |
| 类型:字符向量 |
值:'Inherit: Inherit via internal rule' | 'Inherit: Same as input' | 'Inherit: Same as product output' | 'int8' | 'int16' | 'int32' | 'int64' | 'fixdt(1,16,0)' | '<data type expression>' |
默认值:'Inherit: Inherit via internal rule' |
指定分母系数数据类型。您可以将此参数设置为:
继承数据类型的规则,例如继承: 从内部规则继承
内置整数,例如
int8数据类型对象,例如
Simulink.NumericType对象计算结果为数据类型的表达式,例如
fixdt(1,16,0)
数据类型助手可帮助您设置数据属性。要使用数据类型助手,请点击 。有关详细信息,请参阅使用数据类型助手指定数据类型。
编程用法
模块参数:DenCoefDataTypeStr |
| 类型:字符向量 |
值:'Inherit: Inherit via internal rule' | 'int8' | 'int16' | 'int32' | 'int64' | 'fixdt(1,16)' | 'fixdt(1,16,0)' | '<data type expression>' |
默认值:'Inherit: Inherit via internal rule' |
指定分母系数可以具有的最小值。默认值为 [](未指定)。Simulink 软件使用此值执行:
参数范围检查(请参阅指定模块参数的最小值和最大值)
定点数据类型的自动定标
编程用法
模块参数:DenCoefMin |
| 类型:字符向量 |
| 值:标量 |
默认值:'[]' |
指定分母系数可以具有的最大值。默认值为 [](未指定)。Simulink 软件使用此值执行:
参数范围检查(请参阅指定模块参数的最小值和最大值)
定点数据类型的自动定标
编程用法
模块参数:DenCoefMax |
| 类型:字符向量 |
| 值:标量 |
默认值:'[]' |
指定分母系数的乘积输出数据类型。您可以将此参数设置为:
继承数据类型的规则,例如继承: 从内部规则继承
内置数据类型,例如
int8数据类型对象,例如
Simulink.NumericType对象计算结果为数据类型的表达式,例如
fixdt(1,16,0)
数据类型助手可帮助您设置数据属性。要使用数据类型助手,请点击 。有关详细信息,请参阅使用数据类型助手指定数据类型。
编程用法
模块参数:DenProductDataTypeStr |
| 类型:字符向量 |
值:'Inherit: Inherit via internal rule' | 'Inherit: Same as input' | 'int8' | 'int16' | 'int32' | 'int64' | 'fixdt(1,16,0)' | '<data type expression>' |
默认值:'Inherit: Inherit via internal rule' |
指定分母系数的累加器数据类型。您可以将此参数设置为:
继承数据类型的规则,例如继承: 从内部规则继承
内置数据类型,例如
int8数据类型对象,例如
Simulink.NumericType对象计算结果为数据类型的表达式,例如
fixdt(1,16,0)
数据类型助手可帮助您设置数据属性。要使用数据类型助手,请点击 。有关详细信息,请参阅使用数据类型助手指定数据类型。
编程用法
模块参数:DenAccumDataTypeStr |
| 类型:字符向量 |
值:'Inherit: Inherit via internal rule' | 'Inherit: Same as input' | 'Inherit: Same as product output' | 'int8' | 'int16' | 'int32' | 'int64' | 'fixdt(1,16,0)' | '<data type expression>' |
默认值:'Inherit: Inherit via internal rule' |
指定输出数据类型。您可以将此参数设置为:
继承数据类型的规则,例如继承: 从内部规则继承
内置数据类型,例如
int8数据类型对象,例如
Simulink.NumericType对象计算结果为数据类型的表达式,例如
fixdt(1,16,0)
数据类型助手可帮助您设置数据属性。要使用数据类型助手,请点击 。有关详细信息,请参阅使用数据类型助手指定数据类型。
编程用法
模块参数:OutDataTypeStr |
| 类型:字符向量 |
值:'Inherit: Inherit via internal rule' | 'Inherit: Same as input' | 'int8' | 'int16' | 'int32' | 'int64' | 'fixdt(1,16)' | 'fixdt(1,16,0)' | '<data type expression>' |
默认值:'Inherit: Inherit via internal rule' |
指定模块可以输出的最小值。默认值为 [](未指定)。Simulink 软件使用此值执行:
仿真范围检查(请参阅指定信号范围)
定点数据类型的自动定标
编程用法
模块参数:OutMin |
| 类型:字符向量 |
| 值:标量 |
默认值:'[]' |
指定模块可以输出的最大值。默认值为 [](未指定)。Simulink 软件使用此值执行:
仿真范围检查(请参阅指定信号范围)
定点数据类型的自动定标
编程用法
模块参数:OutMax |
| 类型:字符向量 |
| 值:标量 |
默认值:'[]' |
指定被乘数数据类型。您可以将此参数设置为:
继承数据类型的规则,例如继承: 与输入相同
内置数据类型,例如
int8数据类型对象,例如
Simulink.NumericType对象计算结果为数据类型的表达式,例如
fixdt(1,16,0)
数据类型助手可帮助您设置数据属性。要使用数据类型助手,请点击 。有关详细信息,请参阅使用数据类型助手指定数据类型。
依赖关系
要启用此参数,请将滤波器结构设置为直接 I 型转置
编程用法
模块参数:MultiplicandDataTypeStr |
| 类型:字符向量 |
值:'Inherit: Same as input' | 'int8' | 'int16' | 'int32' | 'int64' | 'fixdt(1,16,0)' | '<data type expression>' |
默认值:'Inherit: Same as input' |
选择此选项可锁定数据类型设置,防止使用定点工具和定点顾问进行更改。有关详细信息,请参阅Lock the Output Data Type Setting (Fixed-Point Designer)。
编程用法
模块参数:LockScale |
值:'off' | 'on' |
默认值:'off' |
指定定点运算的舍入模式。有关详细信息,请参阅舍入模式 (Fixed-Point Designer)。
编程用法
模块参数:RndMeth |
| 类型:字符向量 |
值:'Ceiling' | 'Convergent' | 'Floor' | 'Nearest' | 'Round' | 'Simplest' | 'Zero' |
默认值:'Floor' |
指定对溢出是进行饱和处理还是绕回处理。
on- 将溢出饱和处理为数据类型能够表示的最小值或最大值。off- 溢出将绕回到数据类型可以表示的合适值。
例如,有符号 8 位整数 int8 可以表示的最大值是 127。任何大于此最大值的模块运算结果都会导致 8 位整数溢出。
选择此参数后,模块输出将在达到 127 时饱和。类似地,模块输出将在达到最小输出值 -128 时饱和。
清除此参数后,软件会将导致溢出的值解释为
int8,这可能产生意外结果。例如,以int8表示的模块结果 130(二进制 1000 0010)为 -126。
提示
如果您的模型存在可能的溢出,而您希望在生成的代码中进行显式饱和保护,请考虑选中此参数。
如果您希望优化生成的代码的效率,请考虑清除此参数。清除此参数还可以帮助您避免过度地指定信号超出范围时模块的处理方式。有关详细信息,请参阅信号范围错误故障排除。
如果选中此参数,饱和将应用于模块中的每个内部操作,而不仅仅应用于输出或结果。
一般情况下,代码生成进程可以检测到何时不可能发生溢出。在这种情况下,代码生成器不会生成饱和代码。
编程用法
要以编程方式设置模块参数值,请使用 set_param 函数。
| 参数: | SaturateOnIntegerOverflow |
| 值: | 'off' (默认) | 'on' |
状态属性
为每个状态分配唯一名称。如果此字段为空 (' '),则不会分配任何名称。
要为单个状态分配名称,请输入名称并用引号引起来,例如
'position'。要为多个状态分配名称,请输入以逗号分隔的列表并用花括号括起来,例如
{'a', 'b', 'c'}。每个名称都必须是唯一的。要在 MATLAB® 工作区中分配带变量的状态名称,请输入不带引号的变量。变量可以是字符向量、元胞数组或结构体。
限制
状态名称只会应用于所选模块。
状态数量必须能够被状态名称的数量均分。
指定的名称数量可以少于状态数量,但不能多于状态数量。
例如,可以在具有四个状态的系统中指定两个名称。第一个名称应用于前两个状态,第二个名称应用于后两个状态。
依赖关系
要启用此参数,请将滤波器结构设置为直接 II 型。
编程用法
模块参数:StateName |
| 类型:字符向量 |
值:' ' | 用户定义 |
默认值:' ' |
选中此复选框会要求将状态名称解析为 Simulink 信号对象。
依赖关系
要启用此参数,请将滤波器结构设置为直接 II 型,并为状态名称指定值。仅当将模型配置参数信号解析设置为除无以外的值时,才会显示此参数。
编程用法
模块参数:StateMustResolveToSignalObject |
| 类型:字符向量 |
值:'off' | 'on' |
默认值:'off' |
详细信息
扩展功能
此模块仅支持有符号定点数据类型。
Discrete Filter 模块接受并输出 Simulink 支持的任何有符号数值数据类型的实信号和复信号。该模块支持相同类型的分子和分母系数。
分子和分母系数必须具有相同的复/实性。它们可以有不同的字长和小数长度。
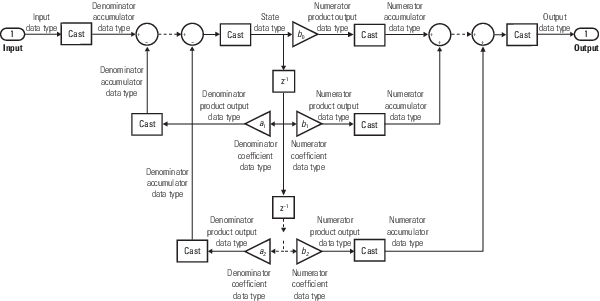
下图显示了 Discrete Filter 模块内用于定点信号的滤波器结构和数据类型。
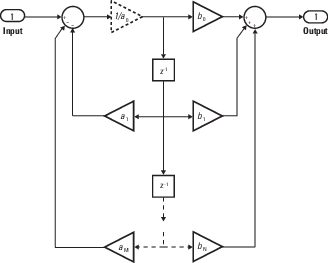
选择通过跳过除以分母首项系数(a0)进行优化参数时,该模块将忽略标虚线的除法。
版本历史记录
在 R2006a 之前推出另请参阅
模块
- Discrete FIR Filter | Allpole Filter (DSP System Toolbox) | Digital Filter Design (DSP System Toolbox)
函数
dsp.IIRFilter(DSP System Toolbox) |dsp.AllpoleFilter(DSP System Toolbox)
主题
- Sample- and Frame-Based Concepts (DSP System Toolbox)
- 使用状态