保障机制
查找满足指定边界和其他约束的控制动作
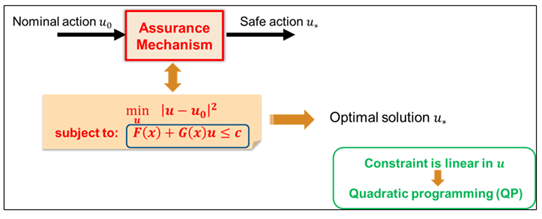
一些控制应用情形要求控制器选择控制动作,以使被控对象状态不违反某些关键约束。在许多情况下,约束会作用于控制器不直接控制的被控对象状态。但您可以定义一个约束函数,该函数根据控制动作信号来定义约束。这些约束强制方法(被广泛称为保障机制)可确保您的系统即使在出现意外情况时,也能在限定的边界内安全运行。这种前瞻性的方法有助于您防止故障并保持控制完整性。
利用 Simulink® Control Design™ 软件,您可以对标称控制动作实施通用约束或专用约束。可用方法汇总于下表。
| 约束类型 | 应用 |
|---|---|
| 通用 - 使用此通用模块将约束指定为系统状态随动作边界变化的函数图 |
|
| 屏障证书 - 使用控制屏障函数定义系统期望状态的安全集,确保状态始终处于该安全集内 |
|
| 无源性 - 通过修改控制动作使闭环系统满足无源性,确保系统随时间耗散能量 |
|
此功能需要 Optimization Toolbox™ 软件,以计算在约束和动作边界下最接近指定控制动作的修正控制动作。
模块
| Constraint Enforcement | Modify control actions to satisfy constraints and action bounds |
| Barrier Certificate Enforcement | Modify control actions to satisfy barrier certificate constraints and action bounds (自 R2022a 起) |
| Passivity Enforcement | Modify control actions to satisfy passivity constraints and action bounds (自 R2023a 起) |
| High-Order Control Barrier Function | Modify control actions to satisfy high-order control barrier function (CBF) constraints and action bounds (自 R2026a 起) |
主题
通用约束强制
- Constraint Enforcement for Control Design
You can modify control actions in real-time to satisfy constraints and action bounds. - Enforce Constraints for PID Controllers
Apply a known constraint function to a PID control application using the Constraint Enforcement block. - Learn and Apply Constraints for PID Controllers
Learn and apply an unknown constraint function for a PID control application using the Constraint Enforcement block.
控制屏障函数强制
- Enforce Safety Constraints with Control Barrier Functions
Modify control actions to satisfy barrier certificate constraints and action bounds. - Enforce Barrier Certificate Constraints for PID Controllers
Apply barrier certificate constraints to a PID control application using the Control Barrier Function block. - Enforce Barrier Certificate Constraints for Adaptive Cruise Control
Enforce barrier certificate constraints for adaptive cruise control to maintain velocity and following distance. - Enforce Barrier Certificate Constraints for Collision-Free Robots
Enforce barrier certificate constraints for two robots to reach their target positions in collision-free manner. - Enforce Barrier Certificate Constraints for Collision-Free Multi-Robot System
Enforce barrier certificate constraints for three robots to reach their target positions in collision-free manner. - Safe PID Controller for Two Link Robot using High-Order Control Barrier Function
Apply high-order CBF constraints to ensure safety for a two-link robot. (自 R2026a 起)
无源性强制
- Passivity Enforcement for Control Design
Modify control actions to satisfy passivity constraints and action bounds. - Enforce Passivity Constraints for Quadruple-Tank System
Enforce passivity constraints for water height control in a quadruple tank system. - Enforce Passivity Constraint for Flexible Beam
Enforce passivity constraints for vibration control in a flexible beam.
强化学习应用
- Train Reinforcement Learning Agent with Constraint Enforcement
Train a reinforcement learning agent with actions constrained using the Constraint Enforcement block. - Train RL Agent for Adaptive Cruise Control with Constraint Enforcement
Train a reinforcement learning agent for adaptive cruise control with enforced constraints on velocity and following distance. - Train RL Agent for Lane Keeping Assist with Constraint Enforcement
Train a reinforcement agent for lane keep assist with enforced constraints on lateral deviation. - Add Safety Constraint to Simulate Two-Link Robot with SAC Agent (Reinforcement Learning Toolbox)
Add high-order barrier function to safely simulate a two-link robot model with a SAC agent.