增益调度
增益调度控制器的增益会作为时间、工况或被控对象参数的函数自动调整。增益调度是其动态特性随时间或工况而变化的控制系统的常用策略。这种系统包括线性参数变化 (LPV) 系统和若干大类非线性系统类。要在 Simulink® 中调节增益调度控制器,您可以使用 tunableSurface 命令将可变增益表示为调度变量的函数。有关调节增益调度控制器的工作流概述,请参阅Gain Scheduling Basics。
函数
模块
主题
增益调度控制系统
- Gain Scheduling Basics
Gain scheduling is an approach to control of non-linear systems using a family of linear controllers, each providing satisfactory control for a different operating point of the system. - Model Gain-Scheduled Control Systems in Simulink
In Simulink, model gain schedules using lookup tables, interpolation blocks, or MATLAB Function blocks.
调节增益调度
- Tune Gain Schedules in Simulink
Understand the general tuning workflow for usingsystuneto tune gain-scheduled controllers. - Plant Models for Gain-Scheduled Controller Tuning
To tune a gain-scheduled control system, you need a collection of linear models describing the plant dynamics at the selected design points. - Multiple Design Points in slTuner Interface
For tuning a gain-scheduled control system, associate a family of linear plant models with theslTunerinterface to your Simulink model. - Parameterize Gain Schedules
A gain surface parameterizes a variable gain in terms of the scheduling variables. Use gain surfaces to model variable gains in a gain-scheduled control system. - Change Requirements with Operating Condition
When tuning gain-scheduled controllers, you can specify tuning objectives that depend on the scheduling variables. - Validate Gain-Scheduled Control Systems
Tuning gain-scheduled controllers guarantees suitable performance only near each design point. It is important to validate the tuning results over the full range of operating conditions.
增益调度自动调节
- Gain-Scheduled PID Autotuning a VTOL UAV During Forward and Backward Transition
Tune gain-scheduled PID controller for VTOL UAV transitioning between operating modes. (自 R2024a 起) - Gain-Scheduled PID Autotuning Torque Control for a Nonlinear PMSM
Tune gain-scheduled PID controllers for d-axis and q-axis current loops of a nonlinear PMSM model. (自 R2024a 起)
HL-20 自动驾驶案例研究
- Trimming and Linearization of the HL-20 Airframe
Linearize an airframe model at an array of design points to use for gain-scheduled control design. - Angular Rate Control in the HL-20 Autopilot
Tune gain-scheduled PI controllers for the inner loop of the HL-20 airframe model. - Attitude Control in the HL-20 Autopilot - SISO Design
Tune a gain-scheduled SISO architecture for controlling roll, pitch, and yaw of the airframe. - Attitude Control in the HL-20 Autopilot - MIMO Design
Tune a gain-scheduled MIMO architecture for controlling roll, pitch, and yaw of the airframe. - MATLAB Workflow for Tuning the HL-20 Autopilot
Design a gain-scheduled control system for the HL-20 airframe in MATLAB®.
精选示例
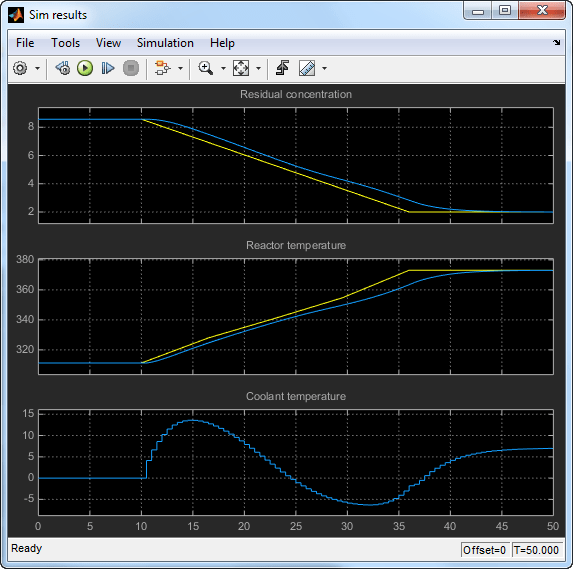
Gain-Scheduled Control of a Chemical Reactor
Tune a gain-scheduled controller for a chemical reactor transitioning from low to high conversion rate.
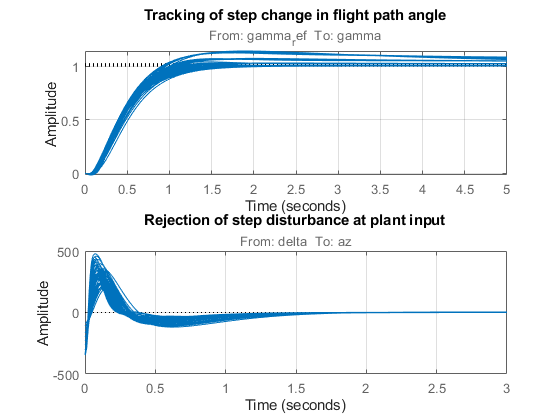
Tuning of Gain-Scheduled Three-Loop Autopilot
Uses systune to generate smooth gain-schedules for a
two-dimensional grid of operating conditions for a control system modeled in Simulink.
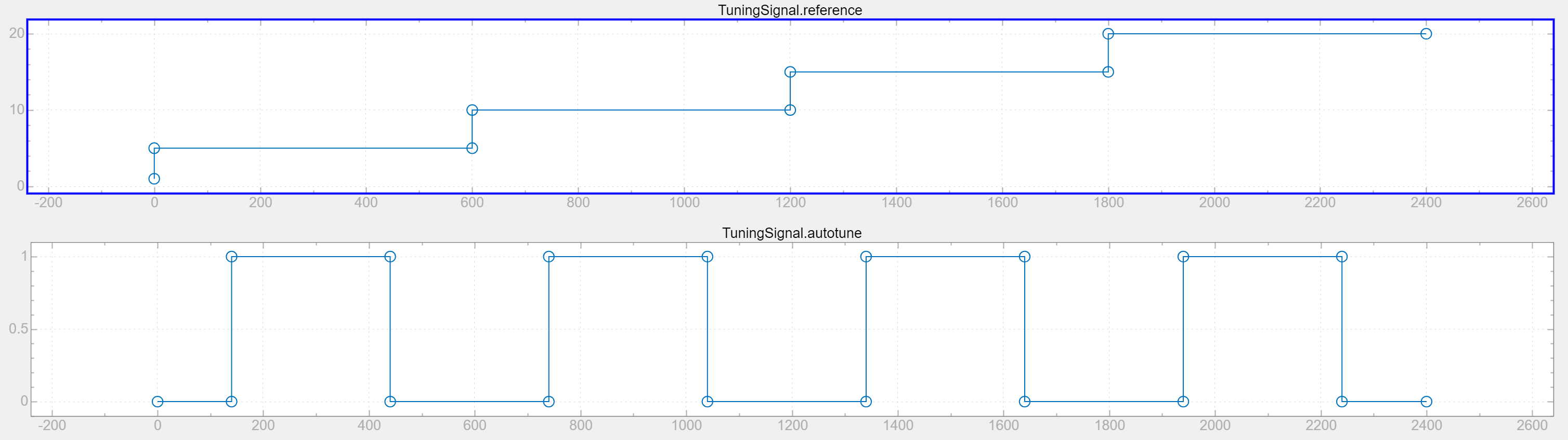
Tune Gain-Scheduled Controller Using Closed-Loop PID Autotuner Block
Use Closed-Loop PID Autotuner block to tune gain-scheduled PID controller for a water-tank model in one simulation.
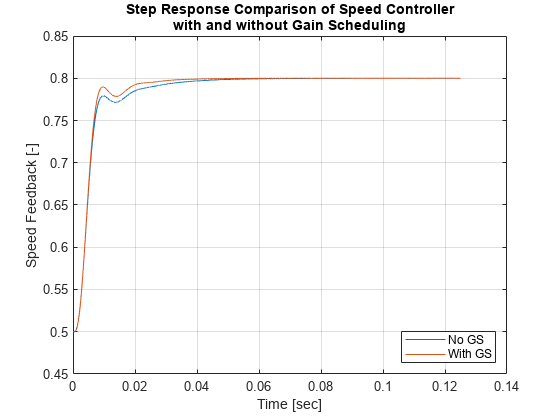
Tune Gain-Scheduled Controller for PMSM Model Using Closed-Loop PID Autotuner Block
Use Closed-Loop PID Autotuner block to tune gain-scheduled PI controller for a PMSM model in one simulation.
UAV Inflight Failure Recovery with Reference Trajectory Tracking
Design a controller to recover a UAV experiencing rotor fault.