应用
Symbolic Math Toolbox 提供了求解、绘制和操作数学表达式的工具,它们能够以高精度进行解析和数值计算。根据符号计算结果,您还可以生成 MATLAB® 函数、Simulink® Function 模块和 Simscape™ 方程,以与其他工具箱一起使用。使用这些工具执行特定于应用的工作流。
精选示例

Solve Partial Differential Equation of Nonlinear Heat Transfer
Solve a partial differential equation (PDE) of nonlinear heat transfer in a thin plate.
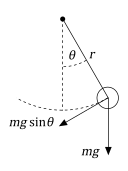
Simulate the Motion of the Periodic Swing of a Pendulum
Solve the equation of motion of a simple pendulum analytically for small angles and numerically for any angle.

Analyze Transfer Function of T-Coil Circuit
Analyze the transfer function of a T-coil circuit using Symbolic Math Toolbox™ and Control System Toolbox™. In this example, you define symbolic equations, solve for the transfer function, and analyze the stability, frequency response, and step response of the circuit.
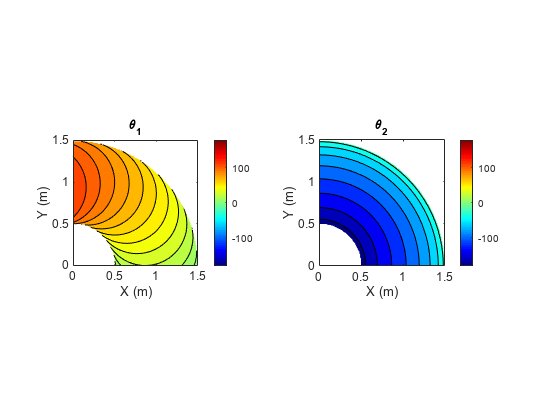
Derive and Apply Inverse Kinematics to Two-Link Robot Arm
Derive and apply inverse kinematics to a two-link robot arm by using MATLAB and Symbolic Math Toolbox.
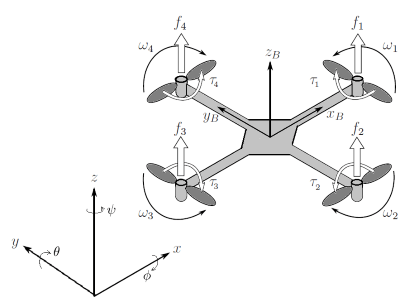
Derive Quadrotor Dynamics for Nonlinear Model Predictive Control
Derive a continuous-time nonlinear model of a quadrotor using Symbolic Math Toolbox.
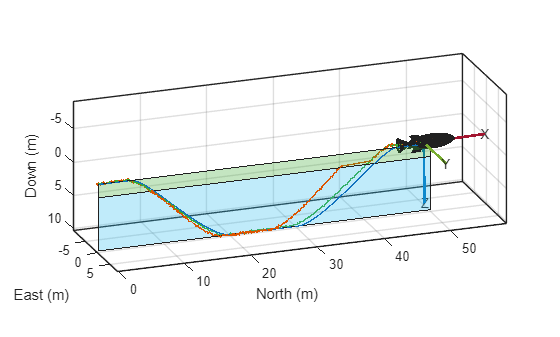
Autonomous Underwater Vehicle Pose Estimation Using Analytical Jacobians in Custom Sensor Models
Compute analytical Jacobians using Symbolic Math Toolbox for Navigation Toolbox application, such as estimating the pose of an autonomous underwater vehicle.
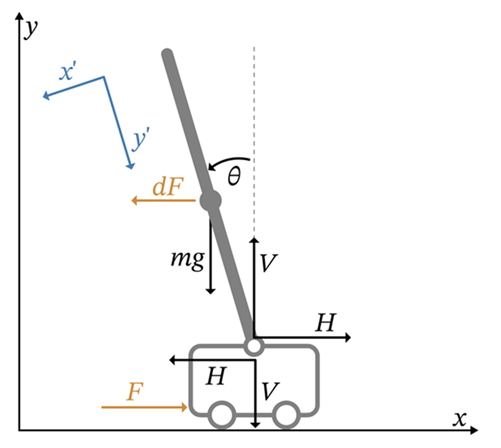
Derive Equations of Motion and Simulate Cart-Pole System
Derive the equations of motion for the cart-pole system using Symbolic Math Toolbox™ and then simulate the cart-pole system using the ode45 solver. In the later sections of the example, you explore how to derive the equations in other forms that can be used to numerically simulate the system (and validate the results) using different tools, such as Simulink®, Simscape™ Multibody™, and Robotics System Toolbox™.
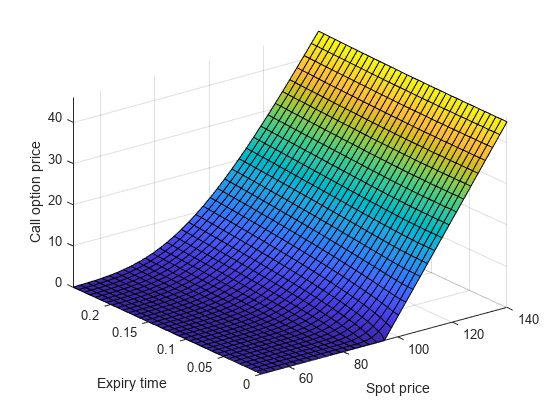
The Black–Scholes Formula for Call Option Price
Calculate the call option price using the Black–Scholes formula. This example uses vpasolve to numerically solve the problems of finding the spot price and implied volatility from the Black–Scholes formula.