Applications
Symbolic Math Toolbox provides tools to solve, plot, and manipulate mathematical expressions, both analytically and numerically with high precision. From the results of symbolic computations, you can also generate MATLAB® functions, Simulink® Function blocks, and Simscape™ equations to use with other toolboxes. Use these tools to perform application-specific workflows.
Related Information
Featured Examples

Solve Partial Differential Equation of Nonlinear Heat Transfer
Solve a partial differential equation (PDE) of nonlinear heat transfer in a thin plate.
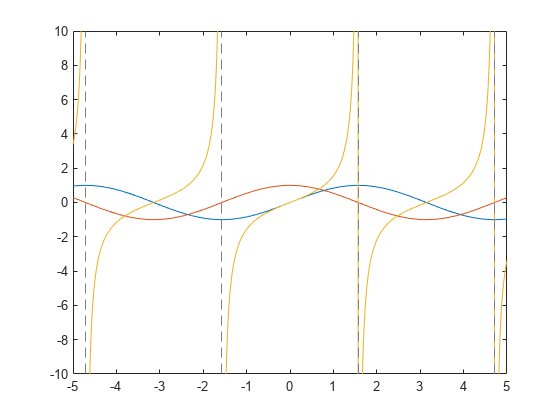
Analytical Plotting with Symbolic Math Toolbox
Symbolic Math Toolbox provides analytical plotting of mathematical expressions without explicitly generating numerical data.
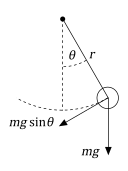
Simulate the Motion of the Periodic Swing of a Pendulum
Solve the equation of motion of a simple pendulum analytically for small angles and numerically for any angle.
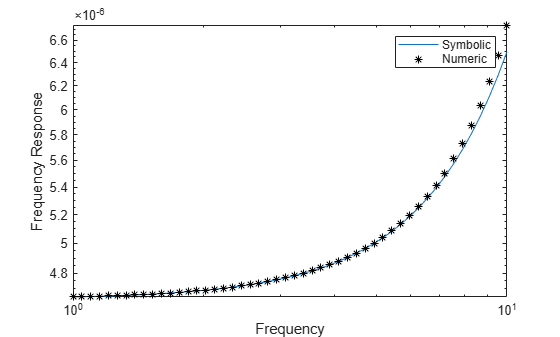
Analytical Model of Cantilever Truss Structure for Simscape
Find parameterized analytical expressions for the displacement of a joint of a cantilever truss structure in both the static and frequency domains.
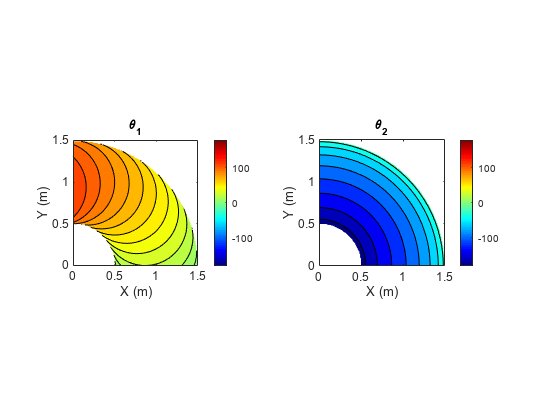
Derive and Apply Inverse Kinematics to Two-Link Robot Arm
Derive and apply inverse kinematics to a two-link robot arm by using MATLAB and Symbolic Math Toolbox.
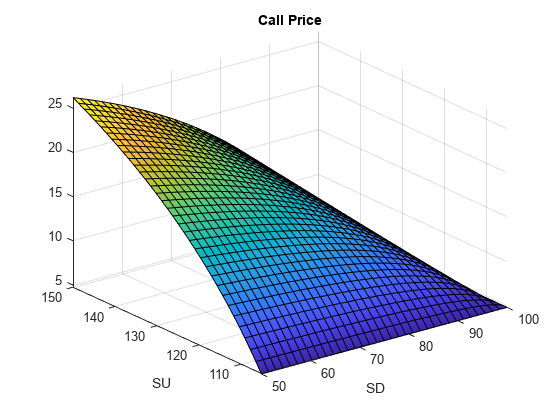
Explore Single-Period Asset Arbitrage
Explore basic arbitrage concepts in a single-period, two-state asset portfolio.
You can also select a web site from the following list
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
Asia Pacific
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)