trainHRNetObjectKeypointDetector
Syntax
Description
trainedKeypointDetector = trainHRNetObjectKeypointDetector(trainingData,keypointDetector,options)keypointDetector. You can specify
keypointDetector as a pretrained or custom HRNet object keypoint
detector. The options input specifies training parameters for the
keypoint detection network.
You can also use this syntax to fine-tune a pretrained HRNet object keypoint detector.
trainedKeypointDetector = trainHRNetObjectKeypointDetector(trainingData,checkpoint,options)
You can use this syntax to:
Add more training data and continue training a keypoint detector.
Improve training accuracy by increasing the maximum number of iterations.
[
returns information on the training progress, such as the training loss and learning rate
for each iteration, using any combination of input arguments from previous syntaxes.trainedKeypointDetector,info] = trainHRNetObjectKeypointDetector(___)
[___] = trainHRNetObjectKeypointDetector(___,
specifies options using one or more name-value arguments. For example,
Name=Value)ExperimentMonitor=[] specifies not to track metrics using Experiment
Manager.
Note
This functionality requires Deep Learning Toolbox™ and the Computer Vision Toolbox™ Model for Object Keypoint Detection. You can install the Computer Vision Toolbox Model for Object Keypoint Detection from the Add-On Explorer. For more information about installing add-ons, see Get and Manage Add-Ons.
Examples
Fine-tune a pretrained HRNet object keypoint detector to detect the keypoints of a human hand in an image. The keypoint detector uses an HRNet-W32 deep learning network, trained on the COCO keypoint detection data set.
Download and load the hand pose data set using helperDownloadHandPoseDataset helper function. The hand pose data set is a labeled data set that contains 2500 images from the Large-Scale Multiview Hand Pose Dataset [1]. Extract a subset of the downloaded hand pose data set that contains the first 100 images. Each image in the data set contains a human hand with 21 annotated keypoints.
downloadFolder = tempdir; dataset = helperDownloadHandPoseDataset(downloadFolder); data = load(dataset); handPoseDataset = data.handPoseDataset(1:100,:);
The training data is a table with three columns in which the first, second, and third columns contain the image filenames, keypoint locations, and hand bounding boxes, respectively. Each entry in the keypoint locations column consists of an N-by-2 matrix, where N is the number of keypoints present in the hand in the corresponding image. Each image contains only one hand, which is one object. Therefore, each row represents one object in an image. Add the full data path to the locally stored hand pose data folder.
handPoseDataset.imageFilename = fullfile(downloadFolder,"2DHandPoseDataAndGroundTruth","2DHandPoseImages",handPoseDataset.imageFilename);
Create an ImageDatastore object for loading the image data.
handPoseImds = imageDatastore(handPoseDataset.imageFilename);
Create an ArrayDatastore object for loading the ground truth keypoint location data.
handPoseArrds = arrayDatastore(handPoseDataset(:,2));
Create a boxLabelDatastore object for loading the bounding box locations.
handPoseBlds = boxLabelDatastore(handPoseDataset(:,3));
Combine the image, array, and box label datastores into a single datastore.
trainingData = combine(handPoseImds,handPoseArrds,handPoseBlds);
Specify the keypoint classes in a human hand.
keypointClasses = ["forefinger3","forefinger4","forefinger2","forefinger1", ... "middleFinger3","middleFinger4","middleFinger2","middleFinger1", ... "pinkyFinger3","pinkyFinger4","pinkyFinger2","pinkyFinger1", ... "ringFinger3","ringFinger4","ringFinger2","ringFinger1", ... "thumb3","thumb4","thumb2","thumb1","wrist"]';
Create an hrnetObjectKeypointDetector object, and configure it to detect the specified keypoints classes.
handKeypointDetector = hrnetObjectKeypointDetector("human-full-body-w32",keypointClasses);
handKeypointDetector.Networkans =
dlnetwork with properties:
Layers: [1036×1 nnet.cnn.layer.Layer]
Connections: [1196×2 table]
Learnables: [1170×3 table]
State: [584×3 table]
InputNames: {'input_1'}
OutputNames: {'finallayer'}
Initialized: 1
View summary with summary.
Specify training options for the hand keypoint detector.
options = trainingOptions("adam", ... MaxEpochs=20, ... InitialLearnRate=0.001, ... MiniBatchSize=16, ... LearnRateSchedule="piecewise", ... LearnRateDropFactor=0.1, ... LearnRateDropPeriod=12, ... VerboseFrequency=25, ... BatchNormalizationStatistics="moving", ... ResetInputNormalization=false);
Fine-tune the pretrained HRNet object keypoint detector on the new data set by using the trainHRNetObjectKeypointDetector function.
[trainedHandKeypointDetector,info] = trainHRNetObjectKeypointDetector(trainingData,handKeypointDetector,options);
*************************************************************************
Training a HRNet Object Keypoint Detector for the following keypoint classes:
* forefinger3
* forefinger4
* forefinger2
* forefinger1
* middleFinger3
* middleFinger4
* middleFinger2
* middleFinger1
* pinkyFinger3
* pinkyFinger4
* pinkyFinger2
* pinkyFinger1
* ringFinger3
* ringFinger4
* ringFinger2
* ringFinger1
* thumb3
* thumb4
* thumb2
* thumb1
* wrist
Epoch Iteration TimeElapsed LearnRate TrainingLoss
_____ _________ ___________ _________ ____________
4 25 00:08:40 0.001 0.0018743
8 50 00:16:21 0.001 0.0017478
11 75 00:22:27 0.001 0.0014061
15 100 00:28:27 0.0001 0.0012995
18 125 00:34:44 0.0001 0.0013525
*************************************************************************
Keypoint detector training complete.
*************************************************************************
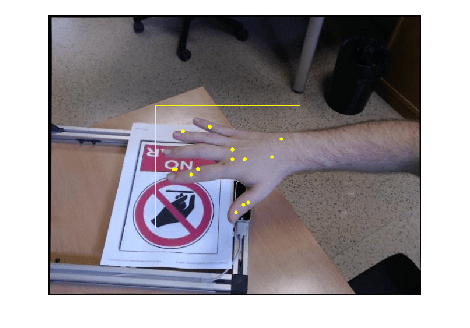
Read a test image. Use the trained HRNet hand keypoint detector to detect hand keypoints and display the detection results.
I = imread("test.jpg"); bbox= [185 156 249 211]; predictedKeypoints = detect(trainedHandKeypointDetector,I,bbox); outputImg = insertObjectKeypoints(I,predictedKeypoints, ... KeypointColor="yellow",KeypointSize=3,LineWidth=3); outputImg = insertShape(outputImg,rectangle=bbox); figure imshow(outputImg)
Supporting Function
function dataset = helperDownloadHandPoseDataset(downloadFolder) dataFilename = "2DHandPoseDataAndGroundTruth.zip"; dataAndImageUrl = "https://ssd.mathworks.com/supportfiles/vision/data/2DHandPose/" + dataFilename; zipFile = fullfile(downloadFolder,dataFilename); if ~exist(zipFile,"file") disp("Downloading hand pose dataset (98 MB)...") websave(zipFile,dataAndImageUrl); end unzip(zipFile,downloadFolder) dataset = fullfile(downloadFolder,"2DHandPoseDataAndGroundTruth","2DHandPoseGroundTruth.mat"); end
References
[1] Gomez-Donoso, Francisco, Sergio Orts-Escolano, and Miguel Cazorla. "Large-Scale Multiview 3D Hand Pose Dataset." Image and Vision Computing 81 (January 2019): 25–33. https://doi.org/10.1016/j.imavis.2018.12.001.