pzmap
动态系统的零极点图
说明
示例
绘制由以下传递函数表示的连续时间系统的零极点:
H = tf([2 5 1],[1 3 5]);
pzmap(H)
grid on
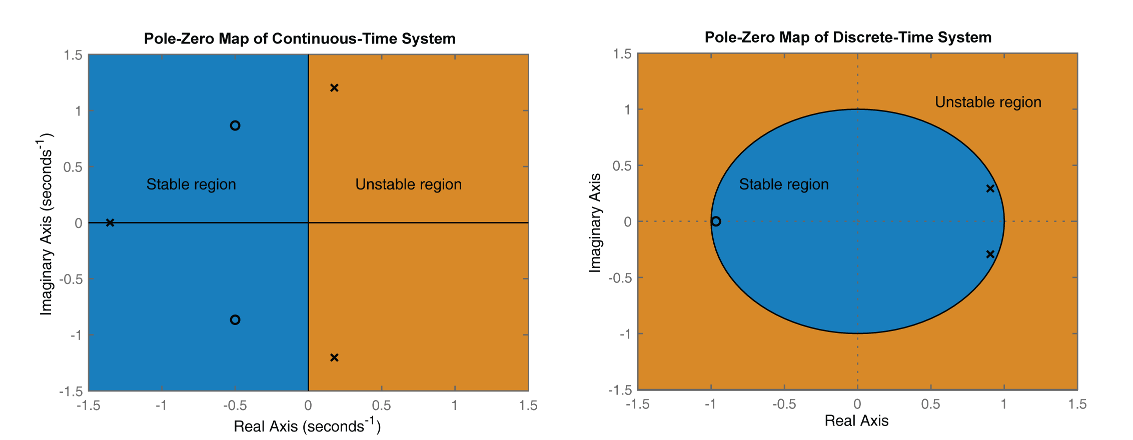
打开网格会显示恒定阻尼比 (zeta) 线和恒定固有频率 (wn) 线。此系统有两个实零点,在图上用 o 标记。该系统还有一对复极点,用 x 标记。
绘制辨识的离散时间状态空间 (idss) 模型的零极点图。在实际操作中,您可以根据系统的输入-输出测量值进行估计,从而获取 idss 模型。对于此示例,我们从状态空间数据创建一个模型。
A = [0.1 0; 0.2 -0.9];
B = [.1 ; 0.1];
C = [10 5];
D = [0];
sys = idss(A,B,C,D,'Ts',0.1);检查零极点图。
pzmap(sys)
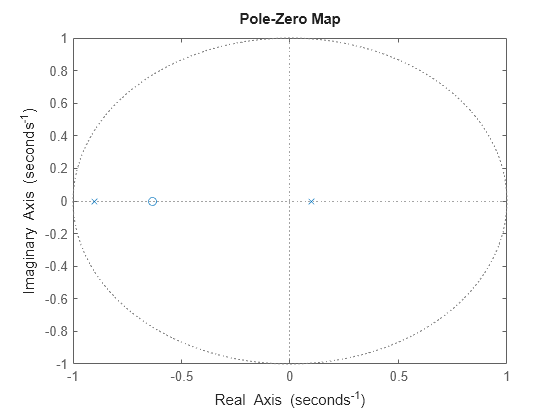
系统极点用 x 标记,零点用 o 标记。
对于此示例,请加载一个由传递函数模型组成的 3×1 数组。
load("tfArray.mat","sys"); size(sys)
3x1 array of transfer functions. Each model has 1 outputs and 1 inputs.
用不同颜色绘制该数组中每个模型的零极点。对于此示例,数组中的第一个模型使用红色,第二个模型使用绿色,第三个模型使用蓝色。
pzplot(sys(:,:,1),"r",sys(:,:,2),"g",sys(:,:,3),"b") grid

该网格在零极点图的 s 平面中显示恒定阻尼比线和固有频率线。
使用 pzmap 计算以下传递函数的零极点:
sys = tf([4.2,0.25,-0.004],[1,9.6,17]); [p,z] = pzmap(sys)
p = 2×1
-7.2576
-2.3424
z = 2×1
-0.0726
0.0131
此示例使用一座八层楼的建筑物模型,每个楼层有三个自由度:两个位移和一个旋转。其中任一位移的 I/O 关系表示为一个包含 48 个状态的模型,其中每个状态表示一个位移或其变化率(速度)。
加载该建筑物模型。
load('building.mat');
size(G)State-space model with 1 outputs, 1 inputs, and 48 states.
绘制系统的零极点。
pzmap(G)
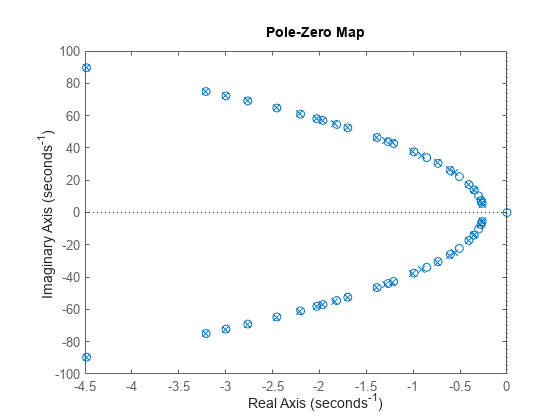
从图中可以看出,有许多接近相消的零极点对可以消除以简化模型,而不会影响整体模型响应。pzmap 可用于直观地辨识这种接近相消的零极点对,以执行零极点简化。