rlocus
动态系统的根轨迹
说明
rlocus(___) 使用所有先前输入参量组合的默认绘图选项绘制 SISO 模型 sys 的根轨迹。如需更多绘图自定义选项,请使用 rlocusplot。
要在同一图上绘制多个动态系统的根轨迹,您可以将
sys指定为以逗号分隔的模型列表。例如,rlocus(sys1,sys2,sys3)在同一图上绘制三个模型的根轨迹。要为图中的每个系统分别指定一种颜色、线型和标记,请为每个系统指定
LineSpec值。例如,rlocus(sys1,LineSpec1,sys2,LineSpec2)绘制两个模型并指定它们的绘图样式。有关指定LineSpec值的详细信息,请参阅rlocusplot。
示例
对于此示例,绘制以下 SISO 动态系统的根轨迹:
sys = tf([2 5 1],[1 2 3]); rlocus(sys)
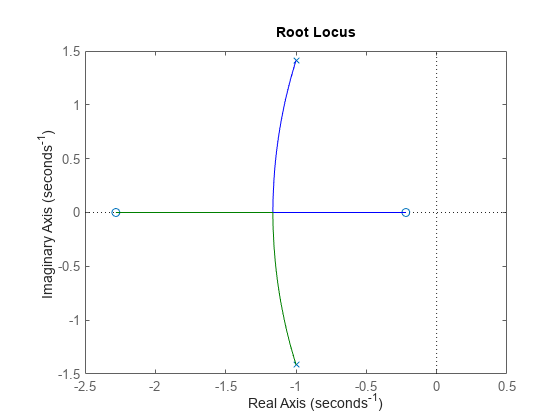
在根轨迹图上,系统的极点用 x 表示,零点用 o 表示。您可以使用生成的根轨迹图中的菜单来添加网格线、放大或缩小,还可以调用属性编辑器来自定义该图。
如需更多绘图自定义选项,请使用 rlocusplot。
对于此示例,假设 sisoModels.mat 包含以下三个 SISO 模型:
sys1一个传递函数模型sys2一个状态空间模型sys3一个零极点增益模型
从 mat 文件中加载模型。
load('sisoModels.mat','sys1','sys2','sys3');
使用 rlocus 创建根轨迹图,并指定每个系统的颜色。还要向根轨迹图中添加一个图例。
rlocus(sys1,'b',sys2,'k',sys3,'r') hold on legend('sys1','sys2','sys3') hold off
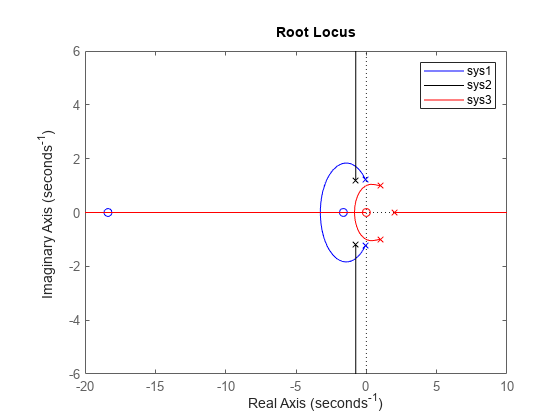
该图在同一绘图中包含所有三个系统的根轨迹图。有关更多绘图自定义,请参阅 rlocusplot。
对于此示例,假设有以下 SISO 传递函数模型:
使用上述传递函数模型和 rlocus 提取闭环极点和相关联的反馈增益值。
sys = tf([3 0 1],[9 7 5 6]); [r,k] = rlocus(sys)
r = 3×53 complex
102 ×
-0.0094 + 0.0000i -0.0104 + 0.0000i -0.0105 + 0.0000i -0.0106 + 0.0000i -0.0107 + 0.0000i -0.0108 + 0.0000i -0.0109 + 0.0000i -0.0111 + 0.0000i -0.0112 + 0.0000i -0.0113 + 0.0000i -0.0115 + 0.0000i -0.0117 + 0.0000i -0.0119 + 0.0000i -0.0121 + 0.0000i -0.0124 + 0.0000i -0.0126 + 0.0000i -0.0129 + 0.0000i -0.0132 + 0.0000i -0.0135 + 0.0000i -0.0139 + 0.0000i -0.0143 + 0.0000i -0.0148 + 0.0000i -0.0152 + 0.0000i -0.0158 + 0.0000i -0.0163 + 0.0000i -0.0170 + 0.0000i -0.0177 + 0.0000i -0.0184 + 0.0000i -0.0192 + 0.0000i -0.0201 + 0.0000i -0.0211 + 0.0000i -0.0222 + 0.0000i -0.0233 + 0.0000i -0.0246 + 0.0000i -0.0259 + 0.0000i -0.0274 + 0.0000i -0.0290 + 0.0000i -0.0307 + 0.0000i -0.0326 + 0.0000i -0.0346 + 0.0000i -0.0368 + 0.0000i -0.0392 + 0.0000i -0.0418 + 0.0000i -0.0446 + 0.0000i -0.0476 + 0.0000i -0.0508 + 0.0000i -0.0543 + 0.0000i -0.0582 + 0.0000i -0.0623 + 0.0000i -0.0667 + 0.0000i
0.0008 + 0.0084i 0.0006 + 0.0083i 0.0006 + 0.0082i 0.0006 + 0.0082i 0.0006 + 0.0082i 0.0006 + 0.0082i 0.0005 + 0.0082i 0.0005 + 0.0082i 0.0005 + 0.0082i 0.0005 + 0.0081i 0.0005 + 0.0081i 0.0004 + 0.0081i 0.0004 + 0.0081i 0.0004 + 0.0080i 0.0004 + 0.0080i 0.0003 + 0.0080i 0.0003 + 0.0080i 0.0003 + 0.0079i 0.0002 + 0.0079i 0.0002 + 0.0078i 0.0002 + 0.0078i 0.0002 + 0.0078i 0.0001 + 0.0077i 0.0001 + 0.0077i 0.0001 + 0.0076i 0.0000 + 0.0076i 0.0000 + 0.0075i -0.0000 + 0.0074i -0.0000 + 0.0074i -0.0000 + 0.0073i -0.0001 + 0.0073i -0.0001 + 0.0072i -0.0001 + 0.0071i -0.0001 + 0.0071i -0.0001 + 0.0070i -0.0001 + 0.0070i -0.0001 + 0.0069i -0.0001 + 0.0068i -0.0001 + 0.0068i -0.0001 + 0.0067i -0.0001 + 0.0067i -0.0001 + 0.0066i -0.0001 + 0.0066i -0.0001 + 0.0065i -0.0001 + 0.0065i -0.0001 + 0.0064i -0.0001 + 0.0064i -0.0001 + 0.0064i -0.0001 + 0.0063i -0.0001 + 0.0063i
0.0008 - 0.0084i 0.0006 - 0.0083i 0.0006 - 0.0082i 0.0006 - 0.0082i 0.0006 - 0.0082i 0.0006 - 0.0082i 0.0005 - 0.0082i 0.0005 - 0.0082i 0.0005 - 0.0082i 0.0005 - 0.0081i 0.0005 - 0.0081i 0.0004 - 0.0081i 0.0004 - 0.0081i 0.0004 - 0.0080i 0.0004 - 0.0080i 0.0003 - 0.0080i 0.0003 - 0.0080i 0.0003 - 0.0079i 0.0002 - 0.0079i 0.0002 - 0.0078i 0.0002 - 0.0078i 0.0002 - 0.0078i 0.0001 - 0.0077i 0.0001 - 0.0077i 0.0001 - 0.0076i 0.0000 - 0.0076i 0.0000 - 0.0075i -0.0000 - 0.0074i -0.0000 - 0.0074i -0.0000 - 0.0073i -0.0001 - 0.0073i -0.0001 - 0.0072i -0.0001 - 0.0071i -0.0001 - 0.0071i -0.0001 - 0.0070i -0.0001 - 0.0070i -0.0001 - 0.0069i -0.0001 - 0.0068i -0.0001 - 0.0068i -0.0001 - 0.0067i -0.0001 - 0.0067i -0.0001 - 0.0066i -0.0001 - 0.0066i -0.0001 - 0.0065i -0.0001 - 0.0065i -0.0001 - 0.0064i -0.0001 - 0.0064i -0.0001 - 0.0064i -0.0001 - 0.0063i -0.0001 - 0.0063i
k = 1×53
0 0.4201 0.4542 0.4911 0.5309 0.5740 0.6205 0.6709 0.7253 0.7841 0.8477 0.9165 0.9908 1.0712 1.1581 1.2521 1.3536 1.4634 1.5822 1.7105 1.8493 1.9993 2.1614 2.3368 2.5263 2.7313 2.9529 3.1924 3.4514 3.7313 4.0340 4.3613 4.7151 5.0975 5.5111 5.9581 6.4415 6.9640 7.5289 8.1397 8.8000 9.5138 10.2856 11.1200 12.0220 12.9973 14.0516 15.1915 16.4238 17.7561
由于 sys 包含 3 个极点,因此生成的极点数组 r 的大小为 3×53。r 中的每列对应于向量 k 中的一个增益值。对于此示例,rlocus 自动选择 k 的从零到无穷大的 53 个值,以获得三个闭环极点的平滑轨迹。
display(r(:,39))
-3.2585 + 0.0000i -0.0145 + 0.6791i -0.0145 - 0.6791i
display(k(39))
7.5289
例如,r(:,39) 包含反馈增益值为 7.5289 的上述闭环极点。
对于此示例,假设有以下 SISO 传递函数模型:
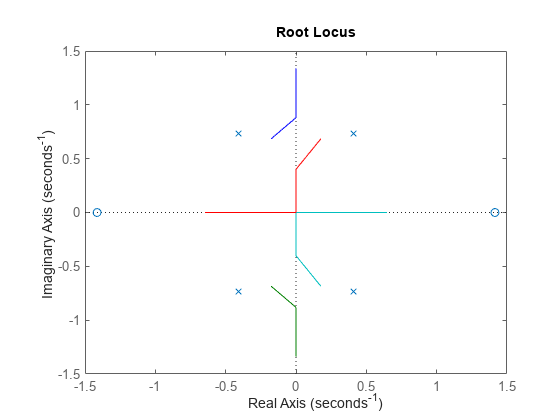
定义传递函数模型和必需的反馈增益值向量。对于此示例,假设一组增益值从 1 到 8 变化,增量为 0.5,并使用 rlocus 提取闭环极点位置。
sys = tf([0.5 0 -1],[4 0 3 0 2]); k = (1:0.5:5); r = rlocus(sys,k); size(r)
ans = 1×2
4 9
由于 sys 包含 4 个闭环极点,因此生成的闭环极点位置数组 r 的大小为 4×9,其中 9 列对应于在 k 中定义的 9 个特定增益值。
您还可以在根轨迹图上可视化 k 中特定增益值的闭环极点轨迹。
rlocus(sys,k)
输入参数
输出参量
提示
有关根轨迹绘制的交互式方法,请参阅控制系统设计器。
对于用于自定义根轨迹图外观的其他选项,请使用
rlocusplot。使用
rlocus创建的绘图不支持以字符串数组或字符向量元胞数组形式指定的多行标题或标签。要指定多行标题和标签,请使用包含newline字符的单个字符串。rlocus(sys) title("first line" + newline + "second line");
算法
动态系统的根轨迹包含作为反馈增益 k 的函数的闭环极点轨迹(假设负反馈)。根轨迹用于研究不同反馈增益对闭环极点位置的影响。反过来,这些位置提供有关时间和频率响应的间接信息。
您可以使用 rlocus 通过设置 sys 计算以下任何负反馈环的根轨迹图,如下图所示。
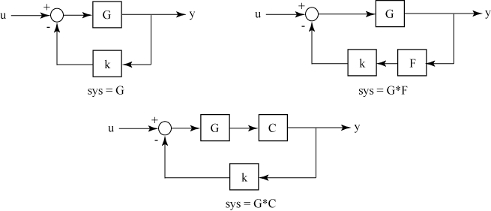
例如,如果 sys 是由下式表示的传递函数:
则闭环极点是下式的根:
根轨迹图描绘随着反馈增益 k 从 0 变化到无穷大时闭环极点的轨迹。