控制系统设计器
设计单输入单输出 (SISO) 控制器
说明
使用控制系统设计器,您可以为在 MATLAB® 或 Simulink® 中建模的反馈系统设计单输入单输出 (SISO) 控制器(需要 Simulink Control Design™ 软件)。
使用此 App,您可以:
使用以下方法设计控制器:
交互式波特图、根轨迹图和尼柯尔斯图等图形编辑器,用于添加、修改和删除控制器极点、零点和增益
自动 PID、LQG 或 IMC 调节
基于优化的调节(需要 Simulink Design Optimization™ 软件)
自动环路成形
调节单环或多环控制架构的补偿器。
使用时域和频域响应(如阶跃响应和零极点图)分析控制系统设计。
比较多个控制系统设计的响应图。
为多模型控制应用设计控制器。
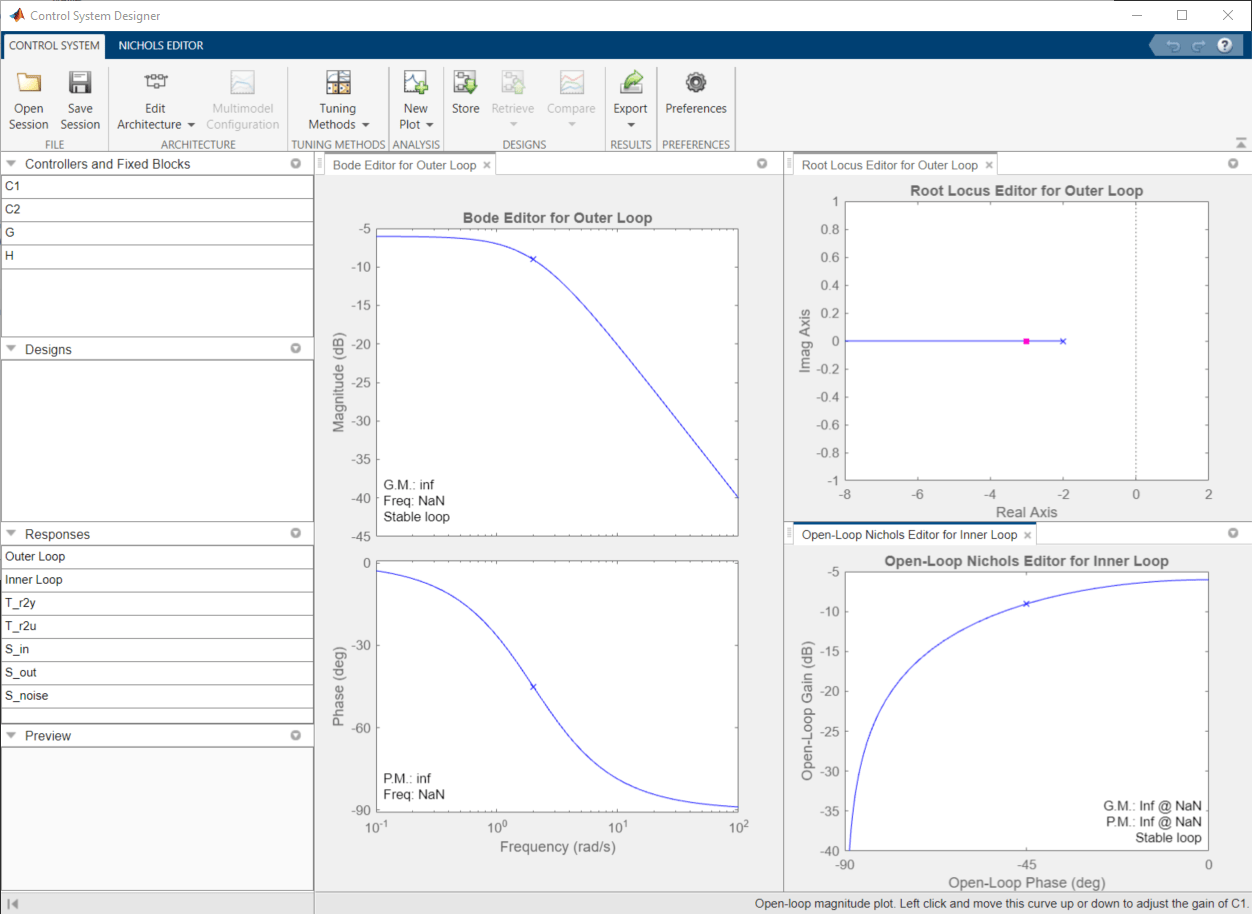
打开 控制系统设计器 App
MATLAB 工具条:在 App 选项卡上的控制系统设计和分析下,点击 App 图标。
MATLAB 命令提示符:输入
controlSystemDesigner。Simulink 工具条:在 App 选项卡上的控制系统下,点击该 App 的图标。
示例
在控制系统设计器中完成控制器设计后,您可以将设计导出到 MATLAB 工作区,以便进行进一步的分析或设计。
在控制系统设计器中,在控制系统选项卡的导出下,点击导出调节模块。

在“导出模型”对话框的选择设计下拉列表中,选择您要导出的设计。您可以选择当前设计,也可以从数据浏览器中选择其中一个存储的设计。
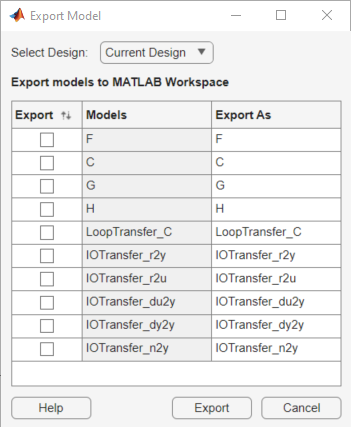
在将模型导出到 MATLAB 工作区表的导出列中,选择您要导出的模型。
对于所有设计,您都可以导出控制器和预滤波器模型。此外,对于当前设计,您还可以从数据浏览器中导出固定模块模型和任何响应。
有关每个控制架构中的预滤波器、控制器和固定模块的详细信息,请参阅控制系统设计器中的反馈控制架构。
在导出为列中,您可以为导出的模型指定备用名称。如果为导出的模型指定的名称与 MATLAB 工作区中的某个现有变量同名,则将覆盖该变量。
要将所选模型保存到 MATLAB 工作区,请点击导出。
在控制系统设计器中完成控制器设计后,为了对您的系统进行仿真,您可以自动为控制架构生成 Simulink 模型。
在控制系统选项卡的导出下,点击创建 Simulink 模型。
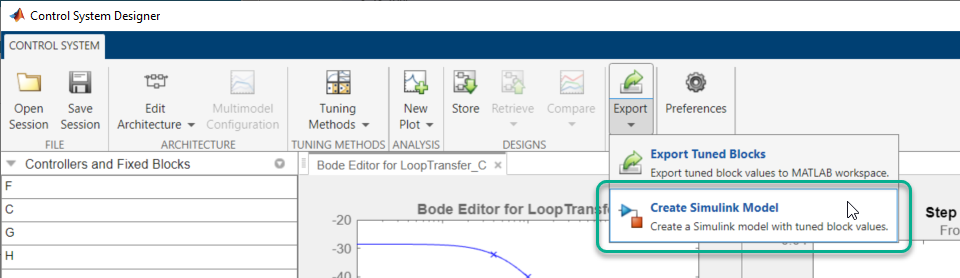
该 App 会将当前设计的控制器和固定模块导出到 MATLAB 工作区,并生成与当前控制架构匹配的 Simulink 模型。有关每个控制架构中的控制器和固定模块的详细信息,请参阅控制系统设计器中的反馈控制架构。
例如,如果您使用配置 1 设计控制系统,控制系统设计器会将 C、F、G 和 H 导出到 MATLAB 工作区,并生成以下 Simulink 模型。

在生成的模型中,Input 模块是 Signal Generator (Simulink)。使用此模块,您可以用不同的输入波形(例如正弦波或随机信号)对您的模型进行仿真。要生成冲激响应,请将 Input 模块替换为 Step (Simulink) 模块。
要为存储的设计生成 Simulink 模型,请先将该设计设为当前设计。在控制系统选项卡的检索下,选择您要为其生成模型的设计。
相关示例
编程用途
controlSystemDesigner 打开控制系统设计器,使用以下默认控制架构:

该架构由 LTI 对象组成:
G - 被控对象模型
C - 补偿器
H - 传感器模型
F - 预滤波器
默认情况下,该 App 将其中每个模型都配置为一个单位增益。
controlSystemDesigner( 将补偿器 C 初始化为 SISO·LTI 模型 plant,comp)comp。
controlSystemDesigner( 将传感器模型 H 初始化为 plant,comp,sensor)sensor。sensor 可以是任何 SISO LTI 模型,也可以是这些模型的数组。如果将 plant 和 sensor 都指定为 LTI 模型数组,则这些数组的长度必须匹配。
controlSystemDesigner( 将预滤波器模型 F 初始化为 SISO·LTI 模型 plant,comp,sensor,prefilt)prefilt。
controlSystemDesigner( 打开 App 并指定初始图形编辑器配置。views)views 可以是以下任何字符向量,也可以是一个包含多个字符向量的元胞数组。
"rlocus"- 根轨迹编辑器"bode"- 开环波特编辑器"nichols"- 开环尼柯尔斯编辑器"filter"- 波特编辑器,用于从预滤波器输入到被控对象输出的闭环响应
除了打开指定的图形编辑器,App 还可绘制闭环输入-输出阶跃响应。
controlSystemDesigner( 指定初始绘图配置,并使用指定的模型初始化被控对象、补偿器、传感器和预滤波器。如果省略模型,App 将使用默认值。views,plant,comp,sensor,prefilt)
controlSystemDesigner( 打开 App,并使用初始化数据结构体 initData)initdata 初始化系统配置。要创建 initdata,请使用 sisoinit。
controlSystemDesigner( 打开 App 并加载之前保存的会话。sessionFile)sessionFile 是 MATLAB 路径中的会话数据文件的名称。这些数据包括当前系统架构和绘图配置,以及保存在数据浏览器中的任何设计和响应。
要保存会话,请在控制系统设计器中的控制系统选项卡上,点击  保存会话。
保存会话。