imageLIME
Explain network predictions using LIME
Syntax
Description
scoreMap = imageLIME(net,X,channelIdx)X when the network
net evaluates the activation score for the channel given by
channelIdx. For classification tasks, specify the
channelIdx as the channel in the softmax layer corresponding to the
class label of interest.
The LIME technique approximates the behavior of the net using a
simpler, more interpretable model. By generating synthetic data from input
X, computing network predictions for the synthetic data using
net, and then using the results to fit a simple regression model, the
imageLIME function determines the importance of each feature of
X to the network's activation score for the channel given by
channelIdx.
This function requires Statistics and Machine Learning Toolbox™.
[
also returns a map of the features used to compute the LIME results and the calculated
importance of each feature.scoreMap,featureMap,featureImportance] = imageLIME(net,X,channelIdx)
___ = imageLIME(___,
specifies options using one or more name-value arguments in addition to the input arguments
in previous syntaxes. For example, Name=Value)NumFeatures=100 sets the target number
of features to 100.
Examples
Use imageLIME to visualize the parts of an image are important to a network for a classification decision.
Import the pretrained network SqueezeNet.
[net, classNames] = imagePretrainedNetwork("squeezenet");Import the image and resize to match the input size for the network.
X = imread("laika_grass.jpg");
inputSize = net.Layers(1).InputSize(1:2);
X = imresize(X,inputSize);Display the image. The image is of a dog named Laika.
imshow(X)
Compute the channel corresponding to the maximum class score. For single observation input, make predictions using the predict function. To make predictions using the GPU, first convert the data to gpuArray. Making predictions on a GPU requires a Parallel Computing Toolbox™ license and a supported GPU device. For information on supported devices, see GPU Computing Requirements (Parallel Computing Toolbox).
score = predict(net,single(X)); [~, channel] = max(score);
Use imageLIME to determine which parts of the image are important to the classification result.
scoreMap = imageLIME(net,X,channel);
Plot the result over the original image with transparency to see which areas of the image affect the classification score.
figure imshow(X) hold on imagesc(scoreMap,AlphaData=0.5) colormap jet

The network focuses predominantly on Laika's head and back to make the classification decision. Laika's eye and ear are also important to the classification result.
Use imageLIME to determine the most important features in an image and isolate them from the unimportant features.
Load a pretrained SqueezeNet network and the corresponding class names. For a list of all available networks, see Pretrained Deep Neural Networks.
[net, classNames] = imagePretrainedNetwork("squeezenet");Import the image and resize to match the input size for the network.
X = imread("sherlock.jpg");
inputSize = net.Layers(1).InputSize(1:2);
X = imresize(X,inputSize);Classify the image. To make prediction with a single observation, use the predict function. To convert the prediction scores to labels, use the scores2label function. To use a GPU, first convert the data to gpuArray. Using a GPU requires a Parallel Computing Toolbox™ license and a supported GPU device. For information on supported devices, see GPU Computing Requirements (Parallel Computing Toolbox).
if canUseGPU X = gpuArray(X); end scores = predict(net,single(X)); [label,score] = scores2label(scores,classNames);
Compute the map of the feature importance and also obtain the map of the features and the feature importance. Set the image segmentation method to 'grid', the number of features to 64, and the number of synthetic images to 3072.
channel = find(label == categorical(classNames)); [scoreMap,featureMap,featureImportance] = imageLIME(net,X,channel,'Segmentation','grid','NumFeatures',64,'NumSamples',3072);
Plot the result over the original image with transparency to see which areas of the image affect the classification score.
figure imshow(X) hold on imagesc(scoreMap,'AlphaData',0.5) colormap jet colorbar

Use the feature importance to find the indices of the most important five features.
numTopFeatures = 5; [~,idx] = maxk(featureImportance,numTopFeatures);
Use the map of the features to mask out the image so only the most important five features are visible. Display the masked image.
mask = ismember(featureMap,idx); maskedImg = uint8(mask).*X; figure imshow(maskedImg);

Use imageLIME with a custom segmentation map to view the most important features for a classification decision.
Import the pretrained network GoogLeNet.
[net,classNames] = imagePretrainedNetwork("googlenet");Import the image and resize to match the input size for the network.
X = imread("sherlock.jpg");
inputSize = net.Layers(1).InputSize(1:2);
X = imresize(X,inputSize);Classify the test images. To make predictions with multiple observations, use the minibatchpredict function. To convert the prediction scores to labels, use the scores2label function. The minibatchpredict function automatically uses a GPU if one is available. Using a GPU requires a Parallel Computing Toolbox™ license and a supported GPU device. For information on supported devices, see GPU Computing Requirements (Parallel Computing Toolbox). Otherwise, the function uses the CPU.
scores = minibatchpredict(net,X); label = scores2label(scores,classNames);
Create a matrix defining a custom segmentation map which divides the image into triangular segments. Each triangular segment represents a feature.
Start by defining a matrix with size equal to the input size of the image.
segmentationMap = zeros(inputSize(1));
Next, create a smaller segmentation map which divides a 56-by-56 pixel region into two triangular features. Assign values 1 and 2 to the upper and lower segments, representing the first and second features, respectively.
blockSize = 56;
segmentationSubset = ones(blockSize);
segmentationSubset = tril(segmentationSubset) + segmentationSubset;
% Set the diagonal elements to alternate values 1 and 2.
segmentationSubset(1:(blockSize+1):end) = repmat([1 2],1,blockSize/2)';To create a custom segmentation map for the whole image, repeat the small segmentation map. Each time you repeat the smaller map, increase the feature index values so that the pixels in each triangular segment correspond to a unique feature. In the final matrix, value 1 indicates the first feature, value 2 the second feature, and so on for each segment in the image.
blocksPerSide = inputSize(1)/blockSize; subset = 0; for i=1:blocksPerSide for j=1:blocksPerSide xidx = (blockSize*(i-1))+1:(blockSize*i); yidx = (blockSize*(j-1))+1:(blockSize*j); segmentationMap(xidx,yidx) = segmentationSubset + 2*subset; subset = subset + 1; end end
View the segmentation map. This map divides the image into 32 triangular regions.
figure imshow(X) hold on imagesc(segmentationMap,'AlphaData',0.8); title('Custom Segmentation Map') colormap gray

Use imageLIME with the custom segmentation map to determine which parts of the image are most important to the classification result.
channel = find(label == categorical(classNames)); scoreMap = imageLIME(net,X, channel, ... 'Segmentation',segmentationMap);
Plot the result of imageLIME over the original image to see which areas of the image affect the classification score.
figure; imshow(X) hold on title('Image LIME (Golden Retriever)') colormap jet; imagesc(scoreMap, "AlphaData", 0.5);
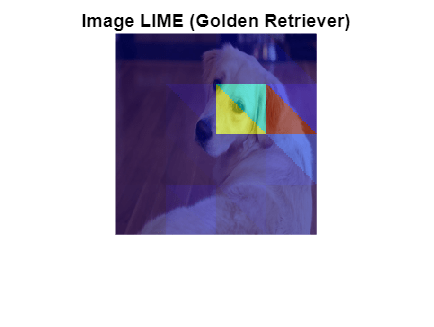
Red areas of the map have a higher importance — when these areas are removed, the score for the golden retriever class goes down. The most important feature for this classification is the ear.
Input Arguments
Name-Value Arguments
Output Arguments
More About
Extended Capabilities
Version History
Introduced in R2020bSee Also
dlnetwork | testnet | minibatchpredict | scores2label | occlusionSensitivity | gradCAM | predict | forward
Topics
- Understand Network Predictions Using LIME
- Investigate Spectrogram Classifications Using LIME
- Interpret Deep Network Predictions on Numeric Feature Data Using LIME
- Understand Network Predictions Using Occlusion
- Grad-CAM Reveals the Why Behind Deep Learning Decisions
- Investigate Network Predictions Using Class Activation Mapping