工业自动化应用领域
Simulink® 使工业设备制造商能够以模型的形式创建可执行规范,为不同工程团队提供清晰的设计方向。下列示例模型说明工业自动化应用。
精选示例
Model and Control Robot Dynamics to Automate Virtual Assembly Line
Extends the Smart4i virtual commissioning applications to accommodate robot dynamics in the system framework to automate assembly line operation. This example models the digit twin of the Smart4i setup and controls the dynamics of robots in the assembly line, which helps develop a more realistic simulation environment. The virtual assembly line consists of four components: two robotic workcells, connected by a shuttle track and a conveyor belt. The first robot, Robot 1, is a Comau Racer V3 and places cups onto the shuttle. The second robot, Robot 2, is a Mitsubishi RV-4F and places balls in the cups. The shuttle track system consists of four shuttles which continuously move to Robot 1, then to Robot 2, followed by a slider. A slider then delivers those cups containing balls to a container. For a detailed system overview, see Automate Virtual Assembly Line with Two Robotic Workcells (Robotics System Toolbox).
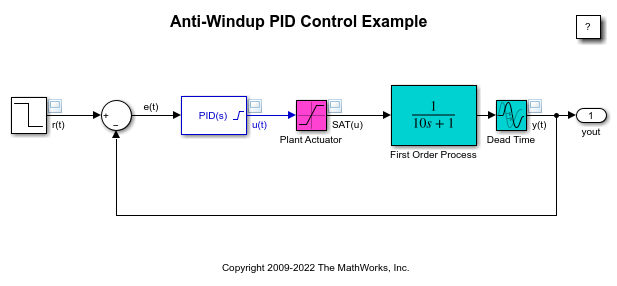
使用 PID Controller 模块进行抗积分饱和控制
此示例说明当作动器饱和时,如何使用抗积分饱和方案来防止 PID 控制器中的积分饱和。Simulink® 中的 PID Controller 模块提供两种内置的抗积分饱和方法(back-calculation 和 clamping),还提供一种跟踪模式来处理更复杂的工业场景。PID Controller 模块支持几个功能,这些功能允许它在常见的工业场景下处理控制器饱和问题。

手动控制与 PID 控制之间的无扰控制转换
此示例展示了从手动控制切换到比例积分微分 (PID) 控制时如何实现无扰控制转移。该模型使用 Simulink® 中的 PID Controller 模块来控制具有死区时间的一阶过程。
用于设定点跟踪的双自由度 PID 控制
此示例说明如何使用带有设定点加权的二自由度 PID 控制来调节电动机的速度。该模型使用PID Controller (2DOF)模块。该模型将设定值在 60 至 30 rpm 之间改变。为了将单位转换为 rad/s 以供 PID 控制器使用,该模型使用了 Signal Conversion 模块。
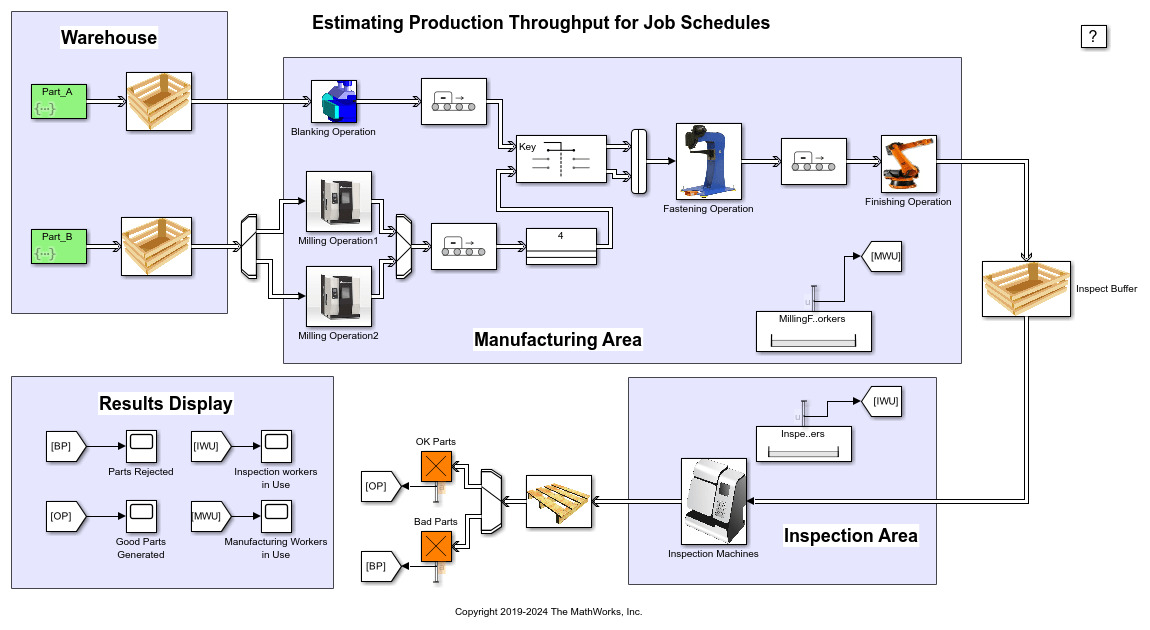
Job Scheduling and Resource Estimation for a Manufacturing Plant
Model a manufacturing plant. The plant consists of an assembly line that processes jobs based on a pre-determined schedule. This example walks you through a workflow for:
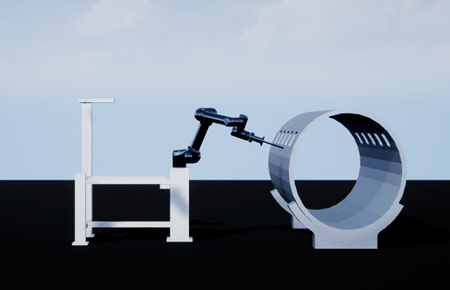
Shape Tracing Manipulator with Simulink 3D Animation
Model and visualize the shape tracing manipulator in the 3D environment.