扰动补偿
使用估计方法,基于被控对象的输入和输出来估计被控对象的状态和扰动。
模块
| Active Disturbance Rejection Control | 为具有未知动态特性和扰动的被控对象设计控制器 (自 R2022b 起) |
| Extended State Observer | Estimate states and disturbances of a system (自 R2024a 起) |
| Disturbance Compensator | Modify control actions to compensate for unknown dynamics and disturbances (自 R2024a 起) |
| Ultra Local Model | Estimate nonlinear plant as single or double integrator systems with an affine term that captures unknown dynamics and disturbances (自 R2025a 起) |
主题
自抗扰控制
- 自抗扰控制
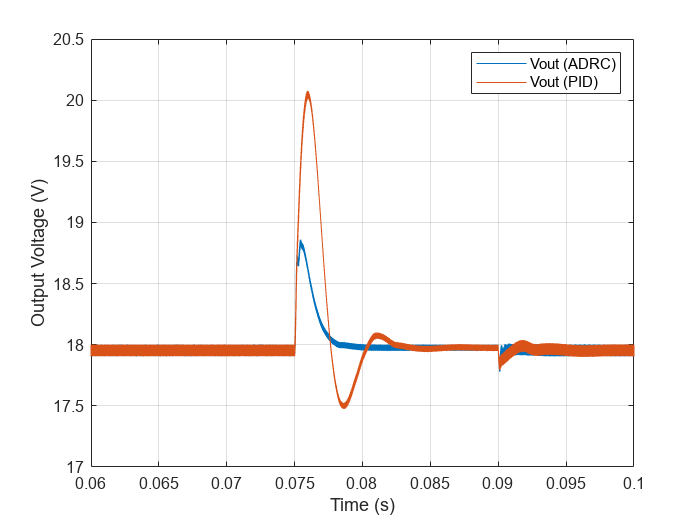
为具有未知动态特性和扰动的被控对象设计抗扰控制器。 - 为水箱系统设计自抗扰控制
为水箱模型设计 ADRC,并与增益调度 PID 控制器比较性能。 - 为多输入多输出被控对象设计 ADRC
设计中试规模精馏塔 MIMO 模型的 ADRC,并与模型预测控制器比较性能。 (自 R2023b 起)
扰动补偿
- 使用扩张状态观测器进行控制设计和扰动补偿
估计和补偿线性时不变系统或线性时变系统中的扰动和未知动态特性。 (自 R2024a 起) - 应用扩张状态观测器实现 DC 电机的参考跟踪
使用 Extended State Observer 模块提高 PID 控制器的抗扰性能。 (自 R2024a 起) - Compensate for Disturbances in Spring-Mass-Damper System
Compensate for disturbances in a spring-mass-damper system using the Disturbance Compensator block. (自 R2024a 起)
超局部模型
- Ultra-Local Model for Disturbance Estimation and Compensation
Estimate disturbances and unmodeled dynamics using ultra-local model. - Ultra-Local Model for System Identification and Output Prediction
Use the Ultra-Local Model block for system identification and output prediction. - Intelligent PID Using Ultra Local Model for Ball on Beam Balance
Implement model-free intelligent PID control technique using ultra-local model.
代码生成
- Deploy Controller for SEPIC Converter for PIL Testing
Set up processor in the loop (PIL) testing and profiling of an active disturbance rejection controller for a SEPIC converter. (自 R2024b 起)
精选示例

使用 PWM 为 BLDC 转速控制设计自抗扰控制
使用脉冲宽度调制为无刷 DC 电机转速控制器设计 ADRC。

Design Active Disturbance Rejection Control for SEPIC Converter
Design ADRC for a SEPIC converter model and compare performance against a PID controller tuned on a linearized model.
为升压转换器设计自抗扰控制
为升压转换器模型设计 ADRC,并与在线性化模型上调节的 PID 控制器比较性能。
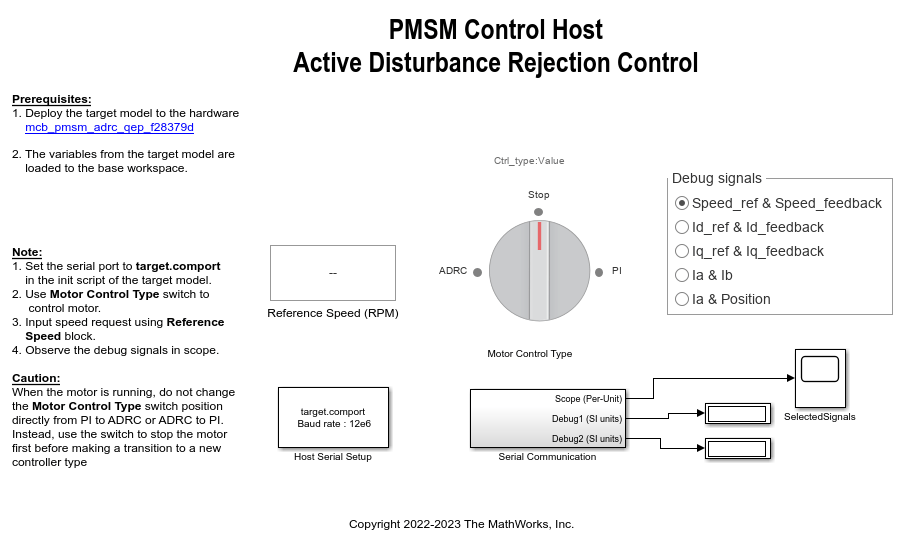
Implement PMSM Speed Control Using Active Disturbance Rejection Control
Implement active disturbance rejection control (ADRC) of the speed of a permanent magnet synchronous motor (PMSM) modeled in Simulink® using the Active Disturbance Rejection Control block. You can use the example to implement field-oriented control (FOC) using either a proportional integral (PI) or ADRC-based controller to run the motor in the speed control mode. Therefore, you can compare the performance of the PI and ADRC controllers.
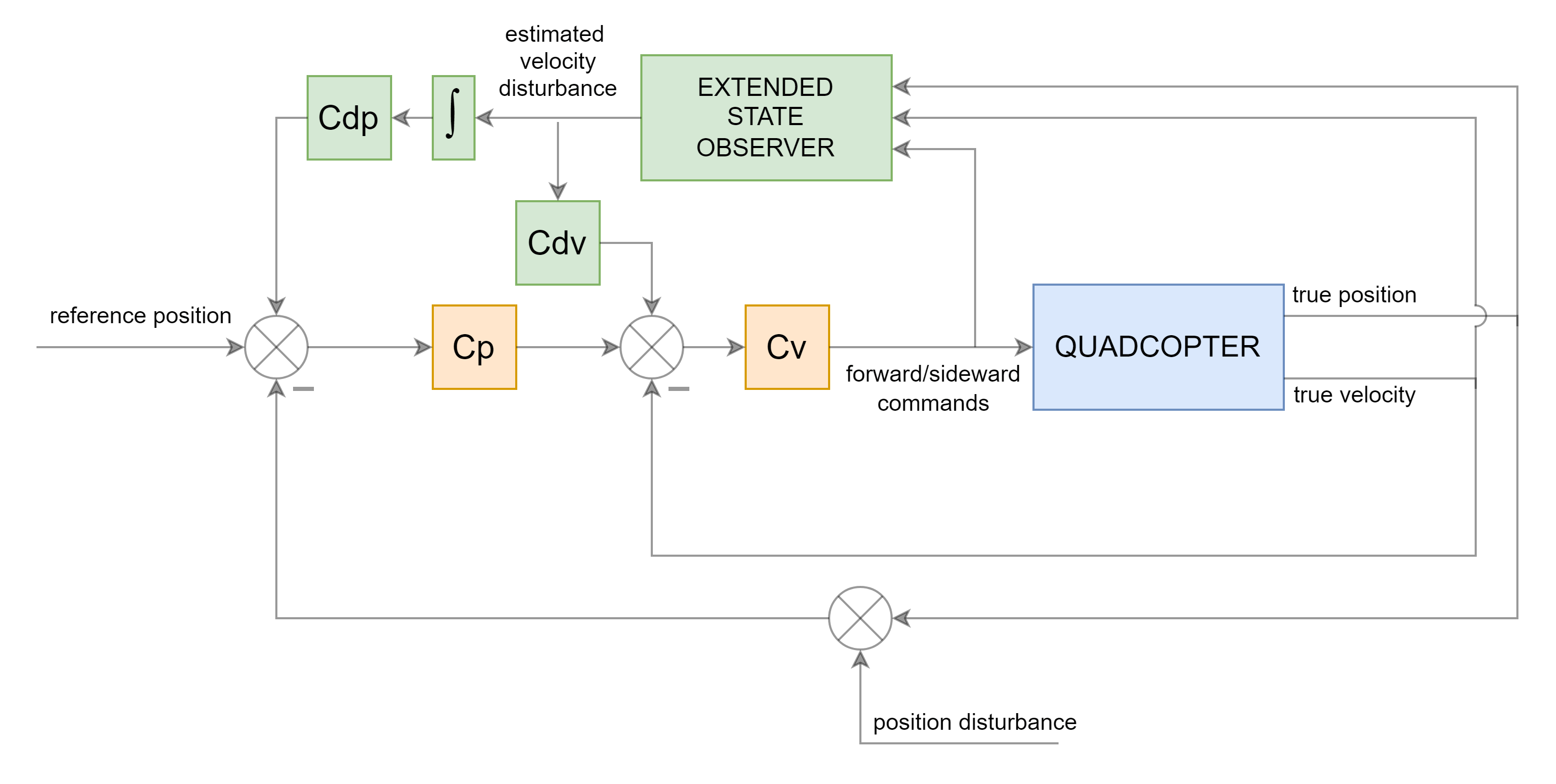
Mitigate GPS Errors in UAV Reference Tracking Using Disturbance Compensation
Mitigate GPS errors and improve tracking performance of a UAV using extended state observer.
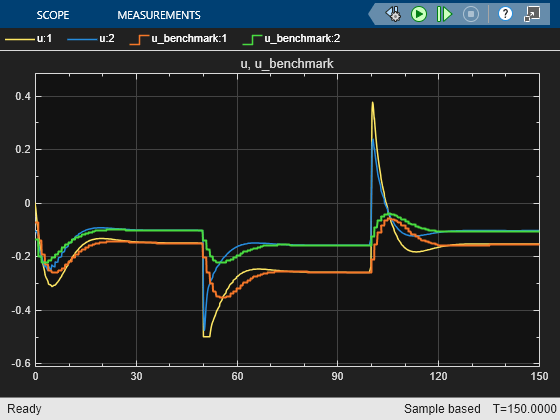
MPC with Disturbance Compensator for a MIMO Plant
Design MPC for a MIMO plant by first using a Disturbance Compensator block to cancel unknown dynamics and disturbances.