活动图的链接和跟踪需求
需求是描述系统的期望行为和特征的语句集合。需求有助于确保系统设计的完整性,并且应该可实现、可验证、无歧义且相互一致。每个设计层级都应该有适当的需求。您可以将需求与活动图中的元素链接起来,以确保可追溯性,并验证系统的行为是否符合指定的需求。需要 Requirements Toolbox™ 许可证才能在 System Composer™ 中链接、追踪和管理需求。
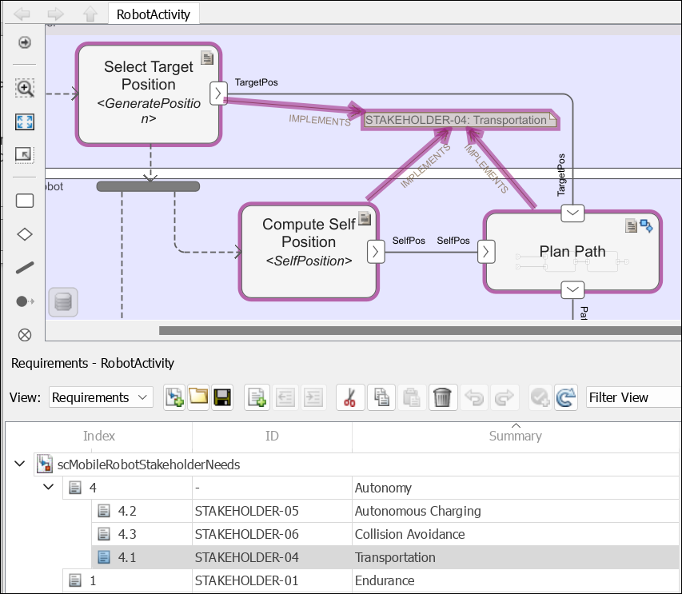
本主题介绍如何在活动图中处理需求。该示例显示了用于建模在随机起点和目的地之间移动的移动机器人架构的功能流程图。
打开模型
打开示例。
openExample('systemcomposer/OpenActivityDiagramForRobotExample');打开工程。
openProject("scMobileRobotExample");有关此示例的更多信息,请参阅编写活动图。
将需求与活动图元素关联
要查看需求,请导航至 App > 需求管理器。
要链接需求,请选择组件 Plan Path。然后,在需求管理器 (Requirements Toolbox)中,右键点击需求 Transportation,选择从 "<组件名称>" (组件)链接。您还可以使用需求编辑器 (Requirements Toolbox)链接需求。有关详细信息,请参阅链接和追踪需求。

组件上的 ![]() 徽章表示该组件与需求相关联。点击此徽章可显示或隐藏活动图画布上的需求。
徽章表示该组件与需求相关联。点击此徽章可显示或隐藏活动图画布上的需求。
![]()
追踪需求
当您点击“需求透视”中的某个元素时,软件会突出显示相关联的需求。相反,当您点击一个需求时,软件会显示相关的元素。
在 RobotActivity 示例中,Select Target Position、Compute Self Position 和 Plan Path 动作节点实现了 Transportation 的利益相关者需求。点击需求时,该信息也会显示在属性检查器中。
您可以使用可追溯性图来可视化需求及其关系的可追溯性。有关详细信息,请参阅使用可追溯性图可视化链接 (Requirements Toolbox)。
另请参阅
函数
工具
模块
- Initial Node | Action Node | Pin | Parameter Node | Decision or Merge Node | Join or Fork Node | Flow Final Node | Activity Final Node