电源转换
探索展示 DC-DC 转换器、PFC(功率因数转换)和 MPPT(最大功率点追踪器)功能的电源转换示例。
主题
- Examples Supporting Texas Instruments C2000 Processors
C2000™ Microcontroller Blockset reference examples that are supported for each processor family.
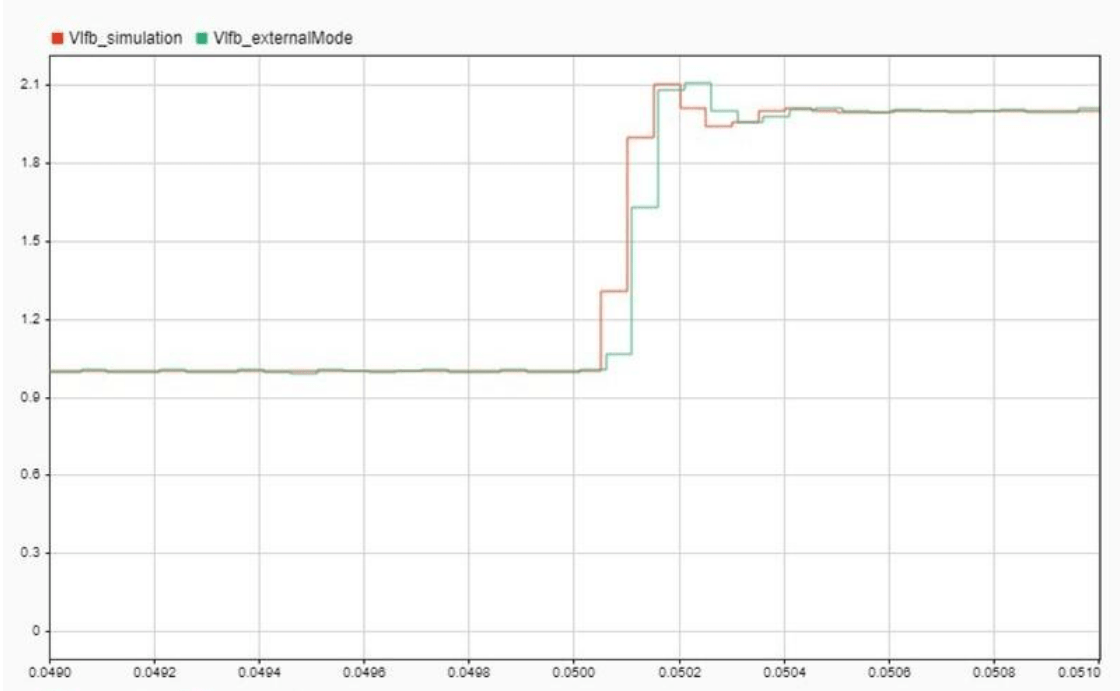
- 基于双模型方法的实时数据记录
采用两种模型方法实时记录数据。
- 将数据/代码加载到闪存并从 TI C2000 的 RAM 运行
在 TI C2000 处理器上,在 RAM 中执行对性能要求较高的函数,而不是在 ROM 中执行。
- Enhance Code Execution Speed in TI C2000 Simulink Applications
Optimize code for efficient execution.
- 使用 Custom Code 模块测量 TI C2000 上的代码执行时间
使用 Custom Code 模块来测量代码执行时间。
精选示例

采用峰值电流模式控制的数字 DC/DC 降压转换器
本示例展示了如何使用比较器子系统 (CMPSS) 通过峰值电流模式控制 (PCMC) 来调节 Texas Instruments™ C2000™ Microcontroller Blockset 降压转换器输出电压 (BOOSTXL-BUCKCONV)。通过这个示例,您可以:
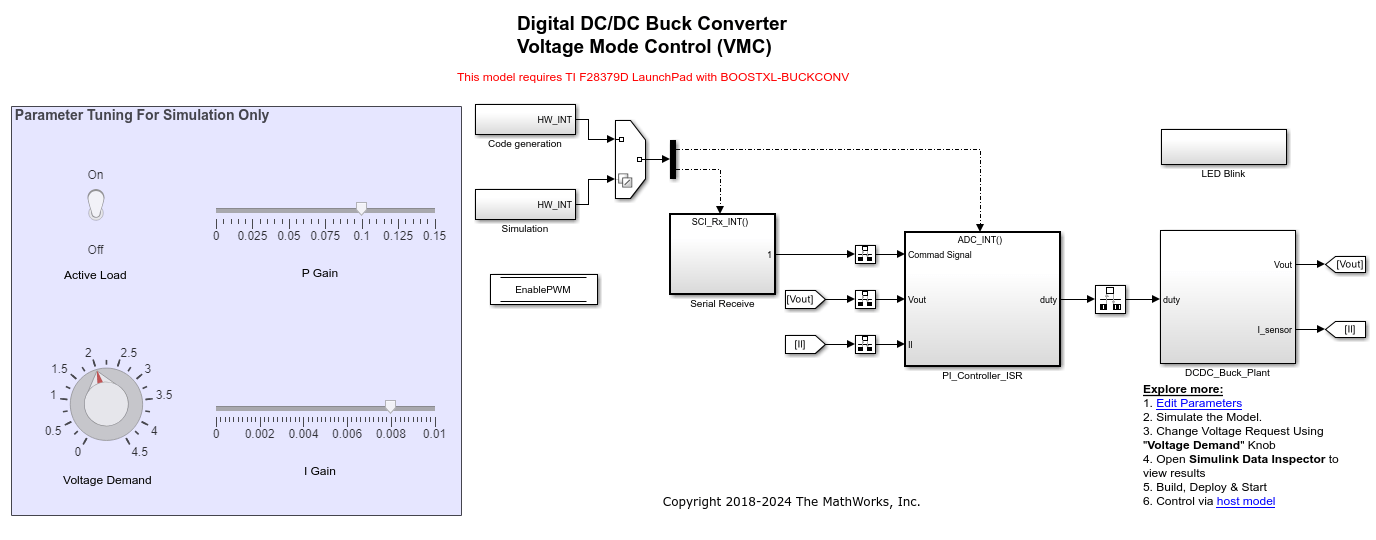
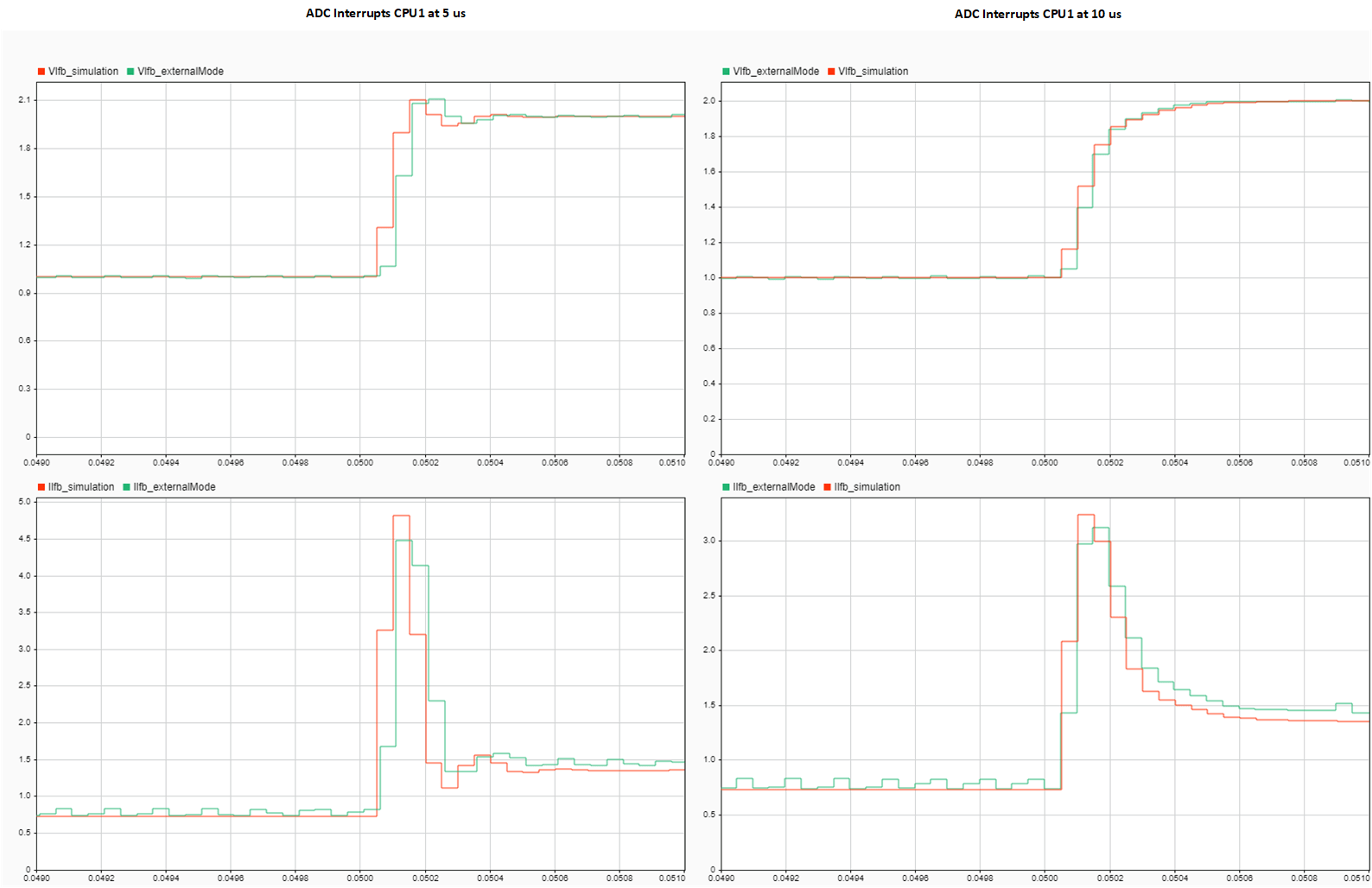
DC-DC 降压转换器的闭环控制
本示例展示了如何在 C2000™ Microcontroller Blockset 中对 DC-DC 降压转换器进行闭环控制建模。该模型运行在连接到 C2000 数字电源增强包的 F28379D Launchpad 上。
基于 MCU 的 C2000 DC-DC 降压转换器
本示例展示了如何开发 DC-DC 降压转换器电源调节器应用程序。电源转换仿真和部署中常见的挑战包括:

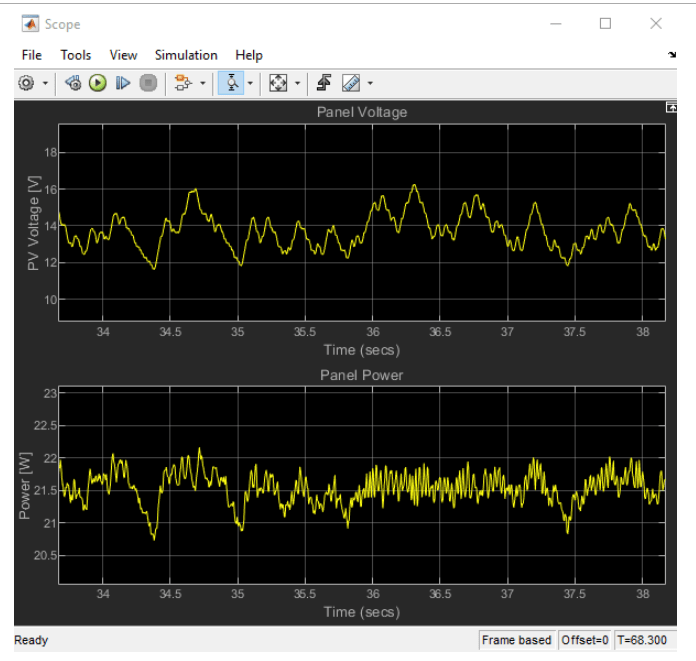
使用 Solar Explorer 套件的带 MPPT 功能的光伏逆变器
本示例展示了如何使用 C2000™ Microcontroller Blockset 实现光伏 (PV) 逆变器系统。该示例使用 Texas Instruments太阳能探索套件以及 Texas Instruments F28035 控制卡。
MPPT Using Flyback Converter in TI Solar Micro Inverter Development Kit
Implement a Maximum Power Point Tracking (MPPT) Algorithm along with control of DC-DC flyback converter using the C2000™ Microcontroller Blocket. The example uses the Texas Instruments™ Solar Micro Inverter Development Kit along with the Texas Instruments F28069M/F28035 controlCARD.
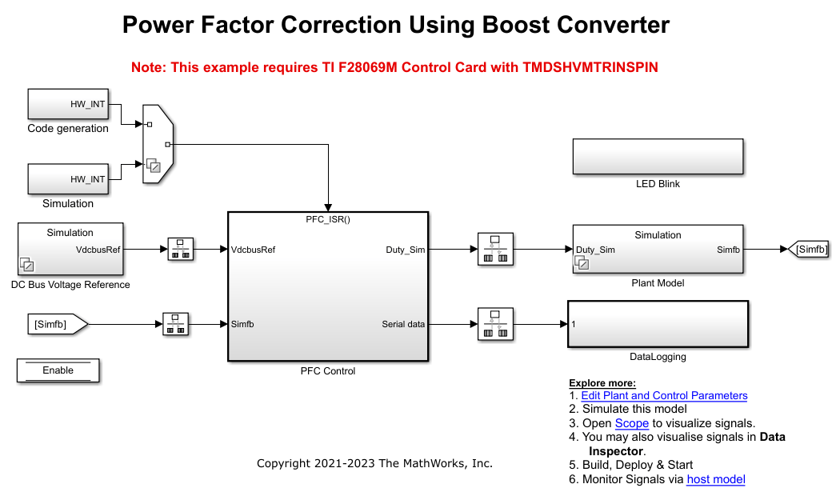
Field Oriented Control of PMSM with Input Power Factor Correction Using Boost Converter
Implement power factor correction (PFC) using a boost converter with the C2000™ Microcontroller Blockset. The example uses the Texas Instruments F28069M controlCARD with high voltage motor control kit (TMDSHVMTRINSPIN).
Read Position of BiSS-C Absolute Encoder
Read a position of an absolute encoder using the bidirectional serial/synchronous-continuous (BiSS-C) open protocol in the unidirectional mode. This example implements the BiSS-C protocol using TI C2000 peripherals such as CLB, SPI, ePWM, X-BAR, and GPIO using the C2000™ Microcontroller Blockset.
直流-直流功率转换中的控制律加速器
本示例展示了如何使用控制律加速器 (CLA) 管理闭环 DC-DC 电源转换系统的电压模式控制 (VMC) 算法。辅助软件电流保护回路由 C2000 CPU 管理。在 TMS320F28379D 和类似的处理器系列中,CLA 执行算法的硬实时部分,可以与 ADC 和 PWM 等硬件外设连接。C2000 CPU 更适合算法中需要多任务处理、异步事件处理以及与其他核心通信的硬实时部分。虽然此示例扩展了 基于 MCU 的 C2000 DC-DC 降压转换器 示例中开发的 DC-DC 降压转换器,但所提出的策略可以应用于任何设计,其中资源密集型硬实时进程在 CLA 上执行,而实时多任务进程在 C2000 CPU 上运行。
Network Managed DC-DC Power Converter
Manage the asynchronous network commands to a high-speed, closed-loop DC-DC buck converter control algorithm executing the C2000 processor by using the ARM® Cortex®-M processor. In the TMS320F28388D and similar processor families, the C2000 processors execute the hard-realtime portions of the algorithm and use peripherals, such as ADC and PWM. In contrast, the ARM Cortex-M processor manages the high-level asynchronous communication, such as UDP or TCP, that connect the MCU to external systems. This example implements a technique that extends the DC-DC buck converter in the 基于 MCU 的 C2000 DC-DC 降压转换器 example. You can apply this technique to any design in which a hard-realtime process executes on the C2000 MCU and a high-level asynchronous communication executes on the ARM Cortex-M processor.
Serially Managed DC-DC Power Converter Using C2000
Use a serial connection to manage a high-speed, closed-loop DC-DC buck converter control algorithm executing the Texas Instruments® C2000™ processor. In most C2000 microcontroller unit (MCU) families, the MCU executes the hard-realtime portions of the algorithm and uses peripherals, such as ADC and PWM. The MCU also includes one or more low-power, serial communication interfaces (SCI) connections. SCI can be used to connect the C2000 MCU to external systems without the need to use other processors, such as ARM® Cortex®-M, for higher level interfaces, such as network UDP or TCP. This example implements a technique that extends the DC-DC buck converter in the 基于 MCU 的 C2000 DC-DC 降压转换器. You can apply this technique to any design in which a hard-realtime process executes on the C2000 MCU and requires low-power connectivity using an SCI.
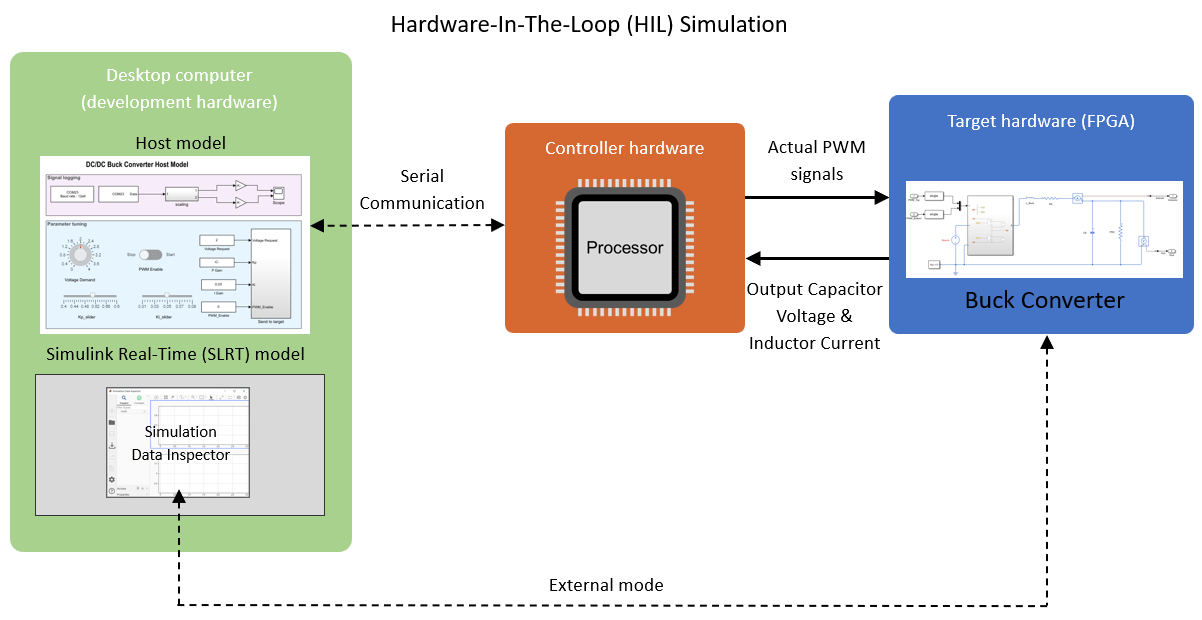
Closed Loop Control of Buck Converter using Hardware-In-The-Loop (HIL) Simulation
Uses hardware-in-the-loop (HIL) simulation to implement the closed loop control of buck converter. The control algorithm requires output voltage feedback, which is then fed to the PI controller. The controller outputs the duty ratio which varies to control the output voltage. For more information, see DC-DC 降压转换器的闭环控制.